Submaps

Submap rendering is an advanced alternative to the /map_v2 WebSocket topic for displaying a robot's map. Instead of receiving the entire map as a single PNG, the client composites the map from many small, overlapping PNG images — one per cartographer submap. Unlike regular image tiles, submaps can overlap and vary in size. This approach is necessary for very large maps (> 2–3 km²) where a single full-resolution PNG becomes impractical.
Submap rendering uses two pieces that are designed to work together:
- The WebSocket topic
/submap_listpublishes the current list of cartographer submaps, including pose, version, and the SLAM session UUID. - The HTTP endpoint
GET /ros/slam/submaps/{uuid}/{trajectory_id}/{submap_index}forwards the ROS service/submap_query_v2and returns the binary protobuf payload for one submap.
The intended consumer flow is:
- Subscribe to
/submap_list. - Track each submap by
(uuid, trajectory_id, submap_index, submap_version). - When a submap is new or its
submap_versionchanges, fetch the correspondingSubmapQueryV2payload. - Decode the returned protobuf and render its
textures.
This is a major mapping surface. The WebSocket topic gives you discovery and invalidation. The HTTP API gives you the actual texture payload.
Submap Rendering vs. /map_v2
Submap rendering is an alternative to subscribing to the /map_v2 WebSocket topic.
/map_v2 publishes the entire occupancy grid as a single PNG covering the whole map. It is straightforward to implement and the payload is usually small. However, as the map grows beyond roughly 2–3 km², storing the full resolution (normally 0.05 m/pixel) in a single image becomes impractical — the pixel count explodes. Even dropping to 0.1 m/pixel only delays the problem.
Submap rendering represents the map as many small, overlapping PNGs — one per cartographer submap. Unlike uniform image tiles, submaps can overlap and are not equal-sized. This scales to arbitrarily large environments because each image is bounded in size. The trade-off is added complexity: you must maintain a per-submap cache, handle individual network requests, and composite potentially overlapping images at render time. The total number of PNG downloads also increases memory usage.
/map_v2 (single PNG) | Submap rendering | |
|---|---|---|
| Implementation complexity | Low | High |
| Typical payload for a small map | ~100 KB (one download) | ~1 MB total (e.g. 100 submaps × 10 KB each) |
| Supports very large maps (> 2–3 km²) | No | Yes |
| Memory usage | Low for small maps | Higher (many images in cache) |
| Network traffic | One large download | Many small downloads |
| Image layout | Non-overlapping | Overlapping, variable size |
Choose /map_v2 for typical indoor environments. Switch to submap rendering when you expect maps that exceed a few square kilometres.
/submap_list WebSocket Topic
Enable the topic with the normal topic WebSocket endpoint:
{ "enable_topic": "/submap_list" }
Example payload:
{
"topic": "/submap_list",
"slam_state": "positioning",
"uuid": "681dc447472ac49d7b074fa1",
"submap": [
{
"trajectory_id": 12,
"submap_index": 3,
"submap_version": 42,
"pose": {
"x": 1.25,
"y": -3.5,
"z": 0,
"qx": 0,
"qy": 0,
"qz": 0.7071,
"qw": 0.7071
},
"is_frozen": true,
"is_incremental_submap": false,
"is_nearby_map": false
}
]
}
Fields
| Field | Type | Notes |
|---|---|---|
slam_state | string | One of invalid, slam, or positioning. |
uuid | string | SLAM session identifier. This is part of the HTTP fetch key. |
submap | array | Current submap entries. Each entry is one cartographer submap. |
Each entry in submap contains:
| Field | Type | Notes |
|---|---|---|
trajectory_id | integer | Cartographer trajectory ID. |
submap_index | integer | Submap index within the trajectory. |
submap_version | integer | Incrementing content version. Refetch textures when this changes. |
pose.x, pose.y, pose.z | number | Submap position in world coordinates. |
pose.qx, pose.qy, pose.qz, pose.qw | number | Submap orientation quaternion. |
is_frozen | boolean | Whether the submap is frozen. |
is_incremental_submap | boolean | Whether the submap belongs to incremental mapping output. |
is_nearby_map | boolean | Whether the submap comes from a nearby map source. |
Usage Notes
uuidchanges when the SLAM session changes. Treat this as a cache boundary.submap_versionis the invalidation token for the texture payload.- The topic does not include the raster cells. It only tells you what to fetch and how to place it.
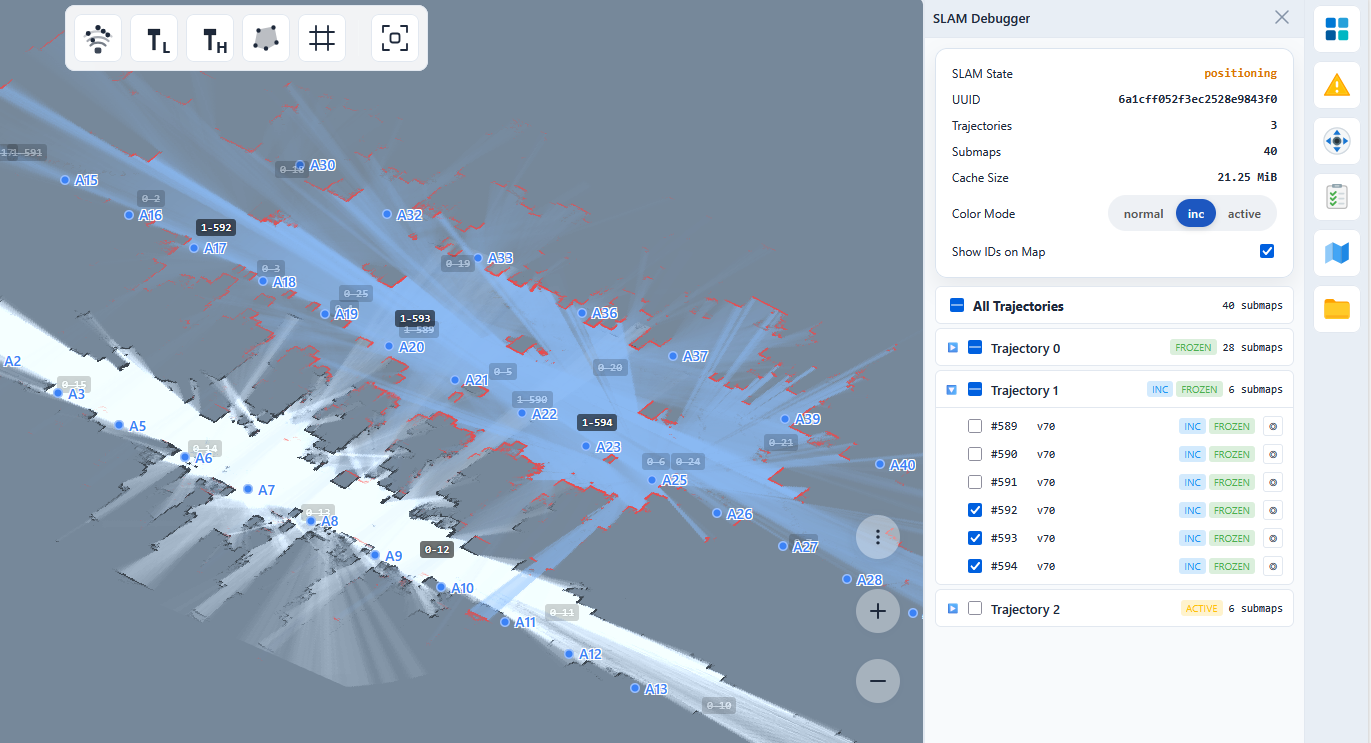
Slam Debugger
The Slam Debugger app visualizes the full submap list in a hierarchical view, grouping submaps by trajectory ID, and allowing each submap to be toggled on/off for inspection.
SubmapQueryV2 HTTP API
The texture payload is fetched through the forwarded ROS service endpoint:
GET /ros/slam/submaps/{uuid}/{trajectory_id}/{submap_index}?ver={submap_version}
Example request:
curl \
-H "Accept: application/x-protobuf" \
"http://192.168.25.25:8090/ros/slam/submaps/681dc447472ac49d7b074fa1/12/3?ver=42" \
-o submap_query.pb
Path Parameters
| Name | Type | Notes |
|---|---|---|
uuid | string | Must match the uuid from /submap_list. |
trajectory_id | integer | From the submap entry. |
submap_index | integer | From the submap entry. |
Query Parameters
| Name | Required | Notes |
|---|---|---|
ver | No | Version token for cache behavior. In normal usage, pass submap_version. |
Response
Successful responses return:
200 OKContent-Type: application/x-protobuf- Protobuf message type
ros_messages.slam.SubmapQueryV2Response
The authoritative protobuf definitions live in the SDK source:
axbot-ts-sdk/src/proto/slam/submap_query.protoaxbot-ts-sdk/src/proto/slam/status.protoaxbot-ts-sdk/src/proto/geometry.proto
Use those files as the source of truth for ros_messages.slam.SubmapQueryV2Response, SubmapTexture, and Pose. The status.code field now uses the StatusCode enum instead of a raw uint32. See slam/status.proto for all enum values.
Texture Semantics
- One HTTP fetch returns all textures for that submap version.
- Most consumers treat
texturesas slice records indexed by slice ID. - Some submaps may not contain every slice. A missing slice should be handled as absent rather than fatal.
cell_formatvalues currently mirror the protobuf definition:0:LOG_ODDS1:TSDF_DELTA2:INTENSITY
Cache Behavior
This endpoint is designed for version-aware caching:
- With
?ver=...:Cache-Control: public, max-age=31536000, immutable - Without
ver:Cache-Control: no-cachewith a weakETag - With matching
If-None-Match:304 Not Modified
In practice, clients should pass submap_version as ver and cache by:
(uuid, trajectory_id, submap_index, submap_version)
Error Responses
| Status | Meaning |
|---|---|
400 | Invalid path parameters |
404 | ROS service reported the submap was not found |
500 | Failed to serialize protobuf response |
502 | ROS service call failed |
504 | ROS service was unavailable before timeout |
404 is commonly treated as a cacheable missing result for the specific version key.
Recommended Client Flow
Raw API Flow
- Open the topic WebSocket and enable
/submap_list. - For each entry in
submap, compare(uuid, trajectory_id, submap_index, submap_version)against your cache. - Fetch missing versions from
/ros/slam/submaps/.... - Decode
SubmapQueryV2Response. - Render
textures[*]using the submap pose from/submap_listand the per-sliceslice_posefrom the protobuf. - Evict older cached versions after the new textures are committed.
SDK Flow
The TypeScript SDK provides two levels of abstraction.
SubmapCache (recommended)
SubmapCache<TSlice> is a generic cache that handles fetch de-duplication, 404 caching, retry cooldowns, concurrency limiting, and resource lifecycle. You supply an adapter that converts a raw SubmapTexture into whatever slice type your renderer uses, and disposes it when evicted.
import { SubmapCache, type SubmapCacheAdapter } from "@kingsimba/axbot-sdk";
import { submapListEvents } from "@kingsimba/axbot-sdk";
import type { ros_messages } from "@kingsimba/axbot-sdk/proto";
// Example: adapter that stores the raw cells as a Uint8Array
const adapter: SubmapCacheAdapter<Uint8Array> = {
buildSlice(tex: ros_messages.SubmapTexture): Uint8Array | null {
return tex.cells ? new Uint8Array(tex.cells) : null;
},
disposeSlice(_slice: Uint8Array): void {
// nothing to free for plain buffers
},
};
const cache = new SubmapCache({ adapter });
submapListEvents.on((msg) => {
cache.setUuid(msg.uuid);
for (const submap of msg.submap) {
cache
.request(msg.uuid, submap.trajectory_id, submap.submap_index, 0, submap.submap_version)
.then((cells) => {
if (!cells) return;
// render cells...
cache.evictOldVersions(
msg.uuid,
submap.trajectory_id,
submap.submap_index,
0,
submap.submap_version,
);
});
}
});
// When the component/scene is torn down:
cache.dispose();
SubmapCache options:
| Option | Default | Notes |
|---|---|---|
adapter | required | buildSlice + disposeSlice callbacks |
api | SDK robotApi singleton | Inject a custom object for testing |
maxConcurrentFetches | 4 | Max parallel HTTP requests |
failureCooldownMs | 3000 | Retry backoff per submap after a failed fetch |
RobotApi.getSubmapQueryV2() (low-level)
For one-off fetches or custom caching strategies, call the method directly:
import { robotApi } from "@kingsimba/axbot-sdk/robotApi";
const result = await robotApi.getSubmapQueryV2(uuid, trajectoryId, submapIndex, version);
if (result) {
console.log(result.message.textures.length, result.payloadLength);
}
Returns null for HTTP 404, throws on non-OK responses, and throws if the decoded protobuf reports a non-zero status code.
Integration Notes
- The map renderer should use
/submap_listas the authoritative list of active submaps. - The binary payload is not JSON. Request it with
Accept: application/x-protobufand decode it as protobuf. - A new
uuidshould invalidate all previously cached submap textures. - A rapidly changing
/submap_listcan publish new versions before old fetches finish, so versioned keys are important. - If you only need the current static map for localization, see Current Map and Pose. Submaps are the live cartographer slices used for SLAM visualization.