建图 (Mapping) API
通过建图 API,您可以:
- 创建、完成、取消或删除建图任务。
- 查看所有建图任务。
- 将建图任务的产物保存为地图。
一个任务具有一种状态,可以是 running (运行中)、finished (已完成)、cancelled (已取消) 或 failed (失败)。
任务成功创建后,会进入 running 状态。 完成后,它将包含一个地图和一个数据包文件 (bag file)。该数据包文件包含建图过程中使用的传感器数据。
建图任务(在 /mappings 下)不能直接用于导航。您必须先将建图任务的产物保存到 /maps 中。
开始建图
curl -X POST \
-H "Content-Type: application/json" \
-d '{"continue_mapping": false}' \
http://192.168.25.25:8090/mappings/
{
"id":48,
"thumbnail_url":null,
"image_url":null,
"grid_origin_x":0.0,
"grid_origin_y":0.0,
"grid_resolution":0.0,
"url":"http://xxxx:10022/mappings/48",
"start_time":1647520760,
"end_time":null,
"state":"running",
"bag_id":null,
"bag_url":null,
"download_url":null
}
请求参数
interface MappingCreateRequest {
// false (默认值):创建一个新地图。
// true:执行增量建图。
// 如果为 true,将继承当前地图(及其坐标系)。
continue_mapping: boolean;
// (自 1.8.8 以后)
// zero (默认值):使用 x=0, y=0, ori=0 作为起点(开启一个新的坐标坐标系)。
// current_pose:使用当前位姿作为起点(继承现有坐标系)。
start_pose_type: "zero" | "current_pose";
}
建图过程的可视化
在建图过程中,使用 WebSockets 接收实时反馈:
它们的渲染效果如下:

完成或取消建图
curl -X PATCH \
-H "Content-Type: application/json" \
-d '{"state": "finished"}' \
http://192.168.25.25:8090/mappings/current
请求参数
interface MappingFinishRequest {
state: "finished" | "cancelled"; // 完成或取消建图任务
// (自 1.8.8 以后)
// false (默认值):保存整个地图。
// true:仅保存地图的增量部分(仅适用于增量建图)。
new_map_only: boolean;
}
建图任务完成后,任务产物会被保存。 随后您可以使用 /mappings/:id 请求获取它们。
建图列表
curl http://192.168.25.25:8090/mappings/
[
{
"id":48,
"url":"http://192.168.25.25:8090/mappings/48",
"grid_origin_x":-8.050000190734863,
"grid_origin_y":-5.650000095367432,
"grid_resolution":0.05,
"start_time":1647520760,
"end_time":1647520995,
"state":"finished",
"bag_id":27,
//////////////////////////////
// 主要数据 (Main data)
//////////////////////////////
// 二进制地图数据文件。支持基于 RANGE + ETAG 的下载。
"pbstream_url":"http://192.168.25.25:8090/mappings/48.pbstream",
// PNG 图像
"image_url":"http://192.168.25.25:8090/mappings/48.png",
// 陆标等
"properties_url": "http://tunnel.autoxing.com:21044/mappings/48/properties.json",
//////////////////////////////
// 辅助数据 (Auxiliary data)
//////////////////////////////
// 较小尺寸的 PNG 图像
"thumbnail_url":"http://192.168.25.25:8090/mappings/48/thumbnail",
// 该建图任务的轨迹
"trajectories_url": "http://192.168.25.25:8090/mappings/48/trajectories.json",
// 用于 SLAM 调试
"bag_url":"http://192.168.25.25:8090/bags/48.bag",
//////////////////////////////
// 已废弃 (Obsolete)
//////////////////////////////
// 已废弃。JSON 格式(base64 编码)的地图数据和图像。不适合大地图。
"download_url":"http://192.168.25.25:8090/mappings/48/download",
},
{
...
}
]
建图详情
curl http://192.168.25.25:8090/mappings/48
{
"id": 48,
"thumbnail_url": "http://192.168.25.25:8090/mappings/48/thumbnail",
"image_url": "http://192.168.25.25:8090/mappings/48.png", // Base64 编码的地图图像 (PNG,用于显示)
"grid_origin_x": -8.050000190734863,
"grid_origin_y": -5.650000095367432,
"grid_resolution": 0.05,
"url": "http://192.168.25.25:8090/mappings/48",
"start_time": 1647520760,
"end_time": 1647520995,
"state": "finished", // 当前状态:running (运行中), finished (已完成), cancelled (已取消), failed (失败)
"bag_id": 27,
"bag_url": "http://192.168.25.25:8090/bags/27.bag",
"download_url": "http://192.168.25.25:8090/mappings/48/download", // 获取 Base64 编码的地图数据(二进制,用于定位)
"trajectories_url": "http://192.168.25.25:8090/mappings/48/trajectories.json",
"landmark_url": "http://192.168.25.25:8090/mappings/48/landmarks.json" // 自 2.11.0 起支持
}
获取建图轨迹
curl http://192.168.25.25:8090/mappings/48/trajectories.json
[
{
"id": 0,
"coordinates": [
[0, 0.01],
[0.01, 0.11],
[0, 0.01],
[0.01, 0.11],
[-0.12, 0.17]
]
}
]
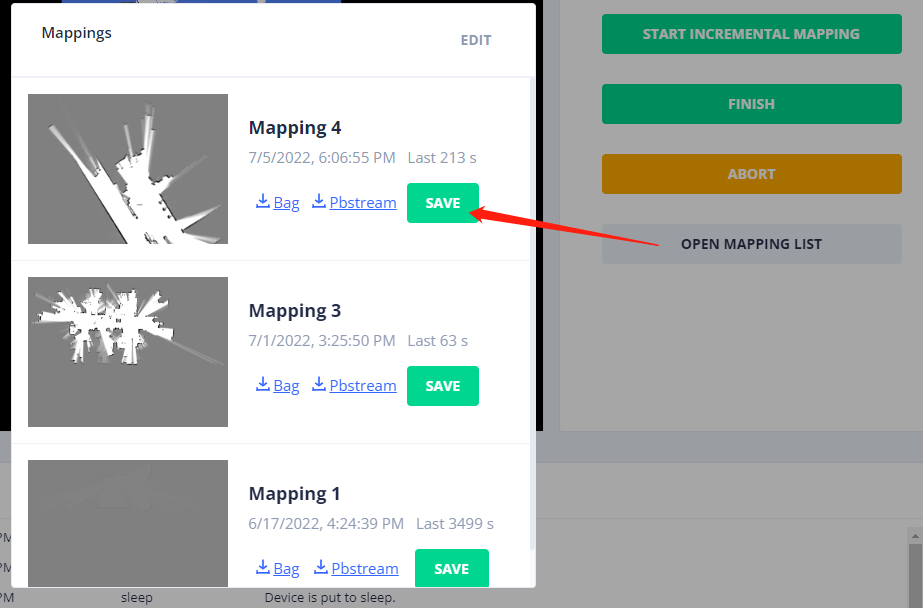
直接将建图产物保存为地图
机器人只有在地图被保存后才能加载并将其用于导航。 此方法(使用 mapping_id)比上传整个地图及其所有字段更加高效。
请求
curl -X POST http://192.168.25.25:8090/maps/
{
"map_name": "From Mapping 4", // 为地图提供一个名称
"mapping_id": 4 // 建图动作的 ID
}
响应
{
"id": 119, // 新创建地图的 ID。使用此 ID 将其加载到机器人上。
"uid": "9b94ac16-239b-11ed-9446-1e49da274768",
"map_name": "From Mapping 4",
"create_time": 1657015615,
"map_version": 1,
"overlays_version": 1,
"thumbnail_url": "http://192.168.25.25:8090/maps/119/thumbnail",
"image_url": "http://192.168.25.25:8090/maps/119.png",
"url": "http://192.168.25.25:8090/maps/119"
}
删除建图任务
curl -X DELETE http://192.168.25.25:8090/mappings/1
删除所有建图任务
curl -X DELETE http://192.168.25.25:8090/mappings/
获取陆标 (Landmarks)
自 2.11.0 起支持
curl http://192.168.25.25:8090/mappings/48/landmarks.json
[
{
"id": "landmark_1",
"pos": [1.234, 2.345]
},
{
"id": "landmark_2",
"pos": [5.234, 8.345]
}
]