当前地图与位姿 API
设置当前地图
有几种方式可以设置当前地图:
- 使用
map_id或map_uid。 - 直接提供地图数据(自 2.7.0 版本起可用)。
- 从本地文件加载(自 2.11.0 版本起可用)。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"map_id": 286}' \
http://192.168.25.25:8090/chassis/current-map
请求参数
class SetCurrentMapRequest {
map_id?: number; // 必须提供 'map_id' 或 'map_uid' 之一。
// 自 2.5.2 版本起可用。地图可以通过其 "uid" 标识。
// 在早期版本中,仅支持 'map_id'。
map_uid?: string;
}
使用数据设置当前地图
从 2.7.0 版本起,您可以使用以下 POST 请求直接设置当前地图。 注意: 对于大地图,此方法可能会非常缓慢。
class SetCurrentMapWithDataRequest {
map_name: string;
occupancy_grid: string; // Base64 编码的 PNG 图像。
carto_map: string; // 二进制地图数据。
grid_resolution: number; // 例如:0.05
grid_origin_x: number; // PNG 地图左下角的 X 坐标。
grid_origin_y: number; // PNG 地图左下角的 Y 坐标。
overlays: string; // 请参阅关于叠加层 (overlays) 的文档。
}
通过加载本地文件设置当前地图
从 2.11.0 版本起,可以直接从机器人上的本地文件加载当前地图。
curl -X POST http://localhost:8090/chassis/current-map \
-H "Content-Type: application/json"
--data '{"data_url":"file:///home/simba/tmp_map/map_73.pbstream", "map_name": "xxx"}'
需要以下三个文件:
/home/simba/tmp_map/map_73.pbstream
/home/simba/tmp_map/map_73.png
/home/simba/tmp_map/map_73.yaml
YAML 文件应包含以下结构:
uid: 62202f9fed0883652d08ad5c
grid_origin_x: -5.900000095367432
grid_origin_y: -9.199999809265137
grid_resolution: 0.05
map_version: 3
overlays_version: 1
overlays: { "map_uid": "62202f9fed0883652d08ad5c", "features": [] }
获取当前地图
curl http://192.168.25.25:8090/chassis/current-map
{
"id": 287,
"uid": "62202f9fed0883652d08ad5c",
"map_name": "26层",
"create_time": 1647862075,
"map_version": 15,
"overlays_version": 25
}
id 对应于地图列表中的条目。 如果当前地图是直接通过数据设置的,则 id 将为 -1。
锁存型 (latched) WebSocket 话题 /map/info 包含当前活动地图的信息。 每当当前地图发生变化时,该话题都会广播一条新消息。
$ wscat -c ws://192.168.25.25:8090/ws/v2/topics
> {"enable_topic": "/map/info"}
< {
"topic": "/map/info",
"name": "26层",
"uid": "62202f9fed0883652d08ad5c",
"map_version": 15,
"overlays_version": 25,
"overlays": {...}
}
设置位姿
在当前地图上设置机器人的位姿(位置和朝向)。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"position": [0, 0, 0], "ori": 1.57}' \
http://192.168.25.25:8090/chassis/pose
请求参数
class SetPoseRequest {
position: [number, number, number]; // 坐标 [x, y, z]。注意 `z` 始终为 0。
ori: number; // 机器人的航向(弧度),逆时针测量。0 值对应于 X 轴正方向。
// [可选]
// 如果为 true,系统将尝试在较小区域内纠正初始位置误差。
// 如果为 false,系统将不尝试任何纠正。
// 如果未提供,其行为未定义,可能会根据软件版本、环境和全局设置而变化。
adjust_position?: boolean;
}
当 adjust_position 设置为 true 时,系统会根据激光雷达 (Lidar) 的观测值检测并纠正初始位置误差。 例如,如果机器人的航向被错误分配,系统将尽力纠正它。
| 纠正前 | 纠正后 |
|---|---|
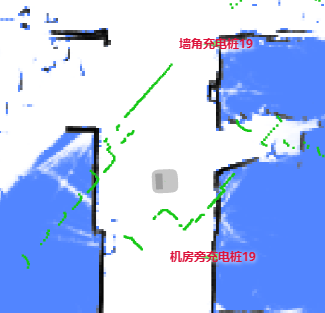 | 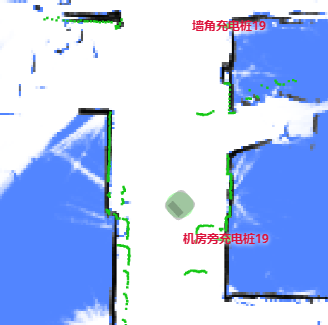 |
注意
纠正算法偶尔会被环境的变化所误导。 因此,如果您确定初始位姿是正确的——特别是在可能存在误导性特征的环境中——请确保将 adjust_position 设置为 false。
位姿反馈
锁存型 (latched) WebSocket 话题 /tracked_pose 提供最新的机器人位姿。
$ wscat -c ws://192.168.25.25:8090/ws/v2/topics
> {"enable_topic": "/tracked_pose"}
< {"topic": "/tracked_pose", "pos": [-3.553, -0.288], "ori": -1.28}
< {"topic": "/tracked_pose", "pos": [-3.55, -0.285], "ori": -1.28}