机器人参数 (Robot Parameters) API
警告
已废弃:请改用系统设置。
获取参数
curl http://192.168.25.25:8090/robot-params
{
"/wheel_control/max_forward_velocity": 0.8,
"/wheel_control/max_backward_velocity": -0.2,
"/wheel_control/max_forward_acc": 0.26,
"/wheel_control/max_forward_decel": -2.0,
"/wheel_control/max_angular_velocity": 0.78,
"/wheel_control/acc_smoother/smooth_level": "normal", // 自 2.7.0 版本起可用。选项:"disabled", "lower", "normal", "higher"。
"/planning/auto_hold": true, // 自 2.3.0 版本起可用。
"/control/bump_tolerance": 0.5, // 自 2.4.0 版本起可用。
"/control/bump_based_speed_limit/enable": true, // 自 2.7.4 版本起可用。
"/robot/footprint": [[0.248, 0.108], [0.24, 0.174], "...", [0.248, -0.108]] // 自 2.5.0 版本起可用。
}
/planning/auto_hold 参数决定了机器人在空闲时车轮是锁定还是自由状态。 当 auto_hold 被禁用且机器人没有执行任务时,可以自由推行或拖动机器人。 这对于手动调整机器人航向或将其定位以装载货物非常有用。 但是,如果机器人在陡坡上,出于安全考虑,即使禁用了 auto_hold,车轮也将保持锁定状态。
/control/bump_based_speed_limit/enable 参数决定机器人是否利用检测到的颠簸程度自动减速。 /control/bump_tolerance 参数设置机器人对颠簸的敏感度。 其值范围从 0 到 1,0.5 为中性设置。 当检测到的颠簸超过公差级别时,机器人将减速。 系统还会学习地图上的门槛和其他颠簸区域的位置,从而允许机器人提前减速。 较大的值会降低机器人对颠簸的敏感度。 较小的值会导致机器人移动得更加谨慎(遇到门槛和不平整表面时减速更多)。
设置参数
可以在单个请求中更新多个参数。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"/wheel_control/max_forward_velocity": 1.2, "/control/bump_tolerance": 0.5}' \
http://192.168.25.25:8090/robot-params
获取默认参数
curl http://192.168.25.25:8090/robot-params/default # 自 2.7.6 版本起可用。
机器人轮廓 (Robot Footprint)
/robot/footprint 参数应准确代表机器人的俯视轮廓。 此轮廓用于碰撞检测,必须正确配置以确保安全运行。 轮廓数据必须遵循以下规则:
- 原点 (0,0) 必须是机器人的旋转中心。
- X 轴指向机器人右侧,Y 轴指向机器人前方。
- 多边形必须是凸多边形 (CONVEX)。
- 多边形不应闭合(即,第一个点不应作为最后一个点重复出现)。
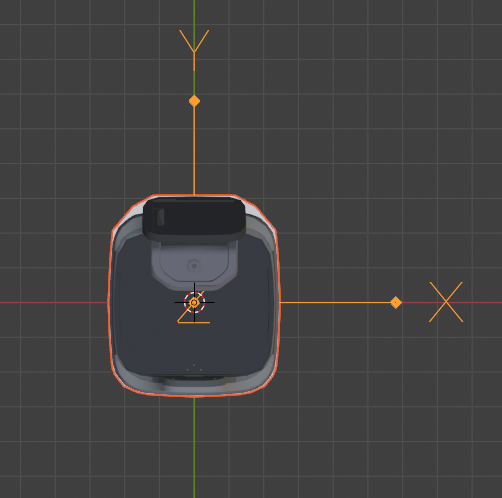
从 2.7.0 版本起,您可以使用 Robot Model Topic (机器人模型话题) 监控轮廓的实时变化。例如,当挂载货架时,轮廓会自动更新为机器人和货架的合并凸包。