系统设置 (System Settings)
自 2.9.0 版本起支持。
系统设置结构如下:
- schema.json (只读) - 包含所有设置的元数据,包括名称、类型、范围和描述。
- default.json (只读) - 包含所有设置的默认值。
- user.json - 存储用户修改的值。
- effective.json (只读) - 包含最终生效的值,由
user.json覆盖在default.json之上生成。
仅 user.json 可修改。每当它更新时,effective.json 会自动重新计算。
schema.json 和 default.json 是特定于机器人型号的只读常量。
架构 (Schema)
curl http://192.168.25.25:8090/system/settings/schema
{
"ax": [
{
"name": "robot.footprint",
"title": "机器人:轮廓 (Footprint)",
"type": "Polygon",
"default": [[0.248, 0.108], ["..."], [0.248, -0.108]]
},
{
"name": "control.auto_hold",
"title": "控制:自动驻车 (Auto Hold)",
"type": "bool",
"default": true,
"description": "空闲时,机器人应保持静止"
},
{
"name": "control.max_forward_velocity",
"title": "控制:最大前进速度",
"type": "float",
"default": 1.2,
"range": "[0, 2.0]"
},
{
"name": "control.max_backward_velocity",
"title": "控制:最大后退速度",
"type": "float",
"default": -0.2,
"range": "[-0.3, 0]"
},
{
"name": "control.max_forward_acc",
"title": "控制:最大前进加速度",
"type": "float",
"default": 0.5,
"range": "[0, 0.8]"
},
{
"name": "control.max_forward_decel",
"title": "控制:最大前进减速度",
"type": "float",
"default": -2.0,
"range": "[-2.0, 0]"
},
{
"name": "control.max_angular_velocity",
"title": "控制:最大角速度",
"type": "float",
"default": 1.2,
"range": "[0, 1.2]"
},
{
"name": "control.acc_smoother.smooth_level",
"title": "控制:加速度平滑级别",
"type": "Enum",
"default": "normal",
"options": ["disabled", "lower", "normal", "higher"]
},
{
"name": "bump_based_speed_limit.enable",
"title": "启用基于颠簸的速度限制",
"type": "bool",
"default": true
},
{
"name": "bump_based_speed_limit.bump_tolerance",
"title": "基于颠簸的速度限制:颠簸公差",
"type": "float",
"default": 0.5,
"range": "[0, 1.0]"
}
]
}
默认设置 (Default Settings)
curl http://192.168.25.25:8090/system/settings/default
用户设置 (User Settings)
获取用户设置:
curl http://192.168.25.25:8090/system/settings/user
保存用户设置:
curl -X POST \
-H "Content-Type: application/json" \
-d '...' \
http://192.168.25.25:8090/system/settings/user
部分更新用户设置:
curl -X PATCH \
-H "Content-Type: application/json" \
-d '...' \
http://192.168.25.25:8090/system/settings/user
生效设置 (Effective Settings)
curl http://192.168.25.25:8090/system/settings/effective
设置选项
本节记录了可用的配置选项。
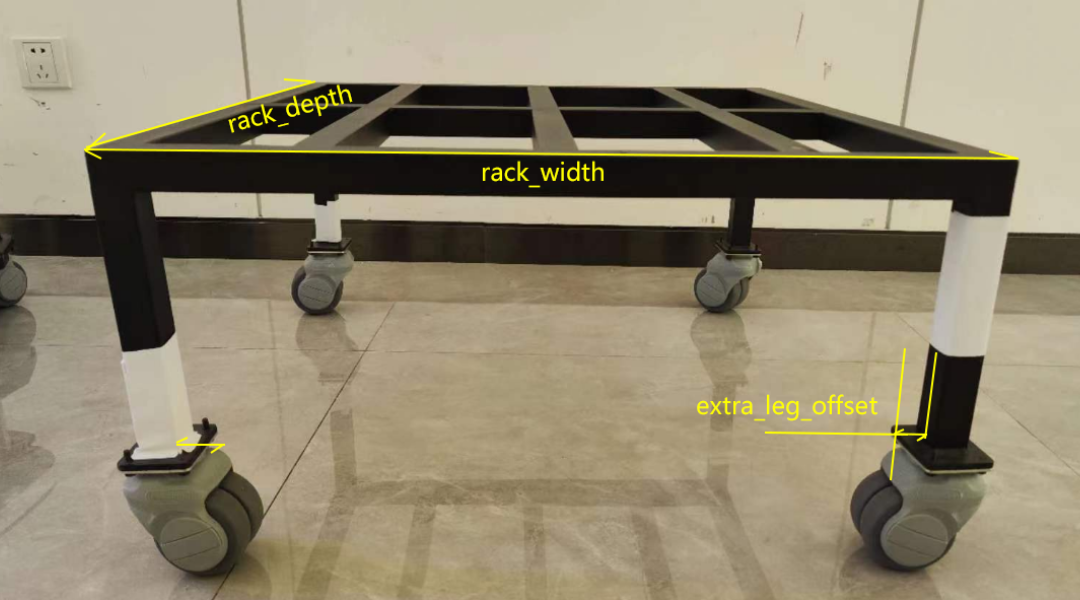
rack.specs (货架规格)
定义货架的物理尺寸以及机器人应如何与其交互。
{
"rack.specs": [
{
"width": 0.66,
"depth": 0.7,
// 某些货架具有超出轮轴基距的突出部分(如把手)。
"margin": [0, 0, 0, 0],
"alignment": "center", // center(中心)/back(后部)。
"alignment_margin_back": 0.02,
// 某些货架腿的底板对激光扫描仪不可见。
// 机器人在货架下方移动时将避开这一额外区域。
"extra_leg_offset": 0.02,
// 自 2.10 版本起:square(方形)/round(圆形)/other(其他)
"leg_shape": "square",
// 自 2.10 版本起:方形腿的边长或圆形腿的直径。
"leg_size": 0.03,
// 自 2.10 版本起。某些货架的脚轮对机器人的激光不可见。
// 使用此参数可以扩大机器人的轮廓,防止碰撞。
"foot_radius": 0.05
}
]
}
width,depth: 货架尺寸。margin: 考虑腿部形成的矩形之外的突出部分。extra_leg_offset: 考虑对 LiDAR 不可见的向内突出的腿。cargo_to_jack_front_edge_min_distance: 货架挂载时,货架前边缘与顶升面板前边缘之间的距离。