移动 (Move) API
创建移动动作
curl -X POST \
-H "Content-Type: application/json" \
-d '{"creator": "xxx", "type": "standard" ...}' \
http://192.168.25.25:8090/chassis/moves
返回
{
"id": 5 // 新创建动作的 ID。
}
请求参数
interface MoveActionCreate {
creator: string; // 动作的发起者(仅用于诊断目的)。
type:
| 'standard'
| 'charge' // 前往充电桩并对接。
| 'return_to_elevator_waiting_point'
| 'enter_elevator'
| 'leave_elevator' // 已废弃。请勿使用。
| 'along_given_route' // 沿着指定路径移动。
| 'align_with_rack' // 钻入货架下方(以便后续顶升)。
| 'to_unload_point' // 移动到货架卸货点(以便后续落下)。
| 'follow_target'; // 跟随移动目标。
target_x?: number;
target_y?: number;
target_z?: number;
target_ori?: number;
target_accuracy?: number; // 单位:米(可选)。
// 要遵循的路径。
//
// 仅当 `type` 为 `along_given_route` 时有效。
// 以逗号分隔的坐标列表字符串,
// 格式为 "x1, y1, x2, y2"。
route_coordinates?: string;
// 沿着指定路径移动时,绕过障碍物的允许偏航距离。
//
// 仅当 `type` 为 `along_given_route` 时有效。
// 当指定为 0 时,机器人遇到障碍物会始终停止并等待,而不会尝试绕行。
detour_tolerance?: number;
// 如果为 true,当机器人进入 `target_accuracy` 半径范围内时,动作将立即成功。
use_target_zone?: boolean = false;
charge_retry_count?: number; // `charge` 动作失败前的重试次数。
rack_area_id: string; // 执行点到区域或区域到区域的货物移动动作时,提供目标货架区域 ID。
properties?: { // 可选:自 2.11.0 起支持
inplace_rotate?: boolean; // 可选。自 2.11.0 起支持:严格原地旋转,不带任何线速度。
// 可选。货架堆叠层数的索引。
// 用于 type = "align_with_rack" 和 "to_unload_point"。
rack_layer?: number;
}
}
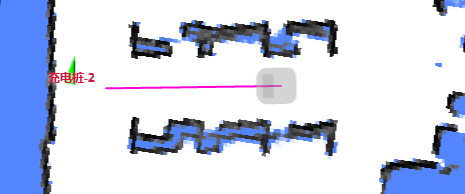
顶升设备
自 2.7.0 起,新增了一个型号(代号为 Longjack),它可以钻入货架下方并将其顶起。
在典型的点到点任务中,机器人应使用以下命令序列来装载货物并将其卸载到另一个位置:
- 钻入货架下方:创建一个
type=align_with_rack的移动动作以钻入货架下方。 - 升起顶升设备:当移动成功时,调用
/services/jack_up。- 顶升设备的进度通过 Jack State Topic (顶升状态话题) 报告。
- 当顶升设备完全升起时,机器人的轮廓 (footprint) 将扩大以适配货架的轮廓。 更新后的轮廓可以通过 Robot Model Topic (机器人模型话题) 获取。
- 移动到卸货点:顶升设备完全升起后,创建另一个
type=to_unload_point的移动动作以移动到卸货点。 - 降下顶升设备:调用
/services/jack_down进行卸货。 - (可选)创建下一个移动动作。机器人在发起下一个动作前会先移开货架点。
| Robot Admin 截图 | 实拍图 |
|---|---|
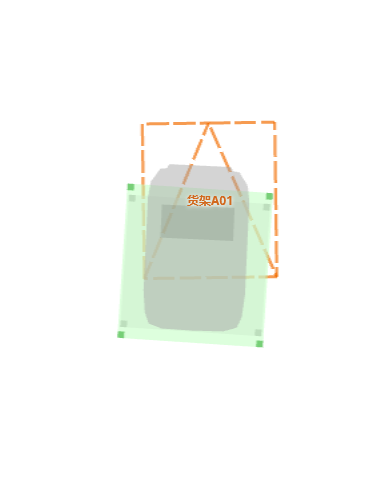 |  |
注意
必须正确配置某些参数才能确保安全运行。参见 rack.specs
点到区域移动
除了将货架或托盘从一个点移动到另一个点的点到点移动外,我们还支持:
- 点到区域移动:当预先不知道目标区域哪些点位是空闲时,这是最常用的移动方式。
- 区域到区域移动:用于将一个区域内的所有货架或托盘移动到另一个区域。
在建图平台上,应添加货架区域多边形。该区域内的所有货架点都被视为该组的一部分。
收到 type=to_unload_point 且 rack_area_id={SOME_ID} 的移动动作后,机器人会扫描该区域内的所有货架点,并移动到第一个空闲点位。如果所有点位都被占用,移动失败并报错 NoFreeSpaceInRackArea。
引入了几个新的失败原因,例如:
InvalidRackAreaIdInvalidRackAreaUnknownRackSpaceStateNoRackInRackAreaAlignFailedInRackAreaNoFreeSpaceInRackAreaFailedToUnloadInRackArea
区域到区域移动
创建一个 type=align_with_rack 且 rack_area_id={SOME_ID} 的移动动作;机器人会巡检源区域,找到第一个存放有货架的货架点,并与其对接。
严格遵循给定路线
当提供 route_coordinates 且 detour_tolerance=0 时,机器人会尽可能紧密地遵循路线,且不会尝试避障(只会停在障碍物前)。
这常用于库存盘点。
跟随目标
此动作指示机器人跟随一个移动的目标。
curl -X POST
-H "content-type: application/json" \
--data '{"type":"follow_target"}' \
http://192.168.25.25:8090/chassis/moves
创建此动作后,用户应通过 WebSocket 话题 /follow_target_state 发送目标位姿:参见 Follow Target
获取移动动作详情
curl http://192.168.25.25:8090/chassis/moves/4409
{
"id": 4409,
"creator": "robot-admin-web",
"state": "cancelled",
"type": "standard",
"target_x": 0.7310126134385344,
"target_y": -1.5250144001960249,
"target_z": 0.0,
"target_ori": null,
"target_accuracy": null,
"use_target_zone": null,
"is_charging": null,
"charge_retry_count": 0,
"fail_reason": 0, // 参见 MoveFailReason
"fail_reason_str": "None - None",
"fail_message": "",
"create_time": 1647509573,
"last_modified_time": 1647509573
}
响应字段说明
interface MoveAction extends MoveActionCreate {
state: "idle" | "moving" | "succeeded" | "failed" | "cancelled";
create_time: number; // Unix 时间戳 (例如:1647509573)。
last_modified_time: number; // Unix 时间戳 (例如:1647509573)。
fail_reason: number; // 失败代码。仅当 state="failed" 时有效。
// 用于调试的内部失败消息。仅当 state="failed" 时有效。
fail_reason_str: string;
// 用于调试的中文内部失败消息。仅当 state="failed" 时有效。
fail_message: string;
}
移动动作列表
所有移动动作的历史记录。
curl http://192.168.25.25:8090/chassis/moves
[
{
"id": 4409,
"creator": "robot-admin-web",
"state": "cancelled",
"type": "standard",
"fail_reason": 0, // 参见 MoveFailReason
"fail_reason_str": "None - None",
"fail_message": "",
"create_time": 1647509573,
"last_modified_time": 1647509573
},
{
"id": 4408,
"creator": "control_unit",
"state": "succeeded",
"type": "none",
"fail_reason": 0, // 参见 MoveFailReason
"fail_reason_str": "None - None",
"fail_message": "",
"create_time": 1647427995,
"last_modified_time": 1647428509
}
]
移动状态反馈
使用 WebSocket 话题 /planning_state 接收移动状态的更新。
{
"topic": "/planning_state",
"move_state": "moving",
"target_poses": [
{
"pos": [2.3, 20.82],
"ori": 0
}
],
"charger_pose": {
"pos": [0, 0],
"ori": 0
},
"going_back_to_charger": false,
"action_id": 4410, // 当前正在执行(或最后一次)移动动作的 ID。
"fail_reason": 0, // 参见 MoveFailReason
"fail_reason_str": "none",
"remaining_distance": 3.546117067337036,
"move_intent": "none",
"intent_target_pose": {
"pos": [0, 0],
"ori": 0
},
"stuck_state": "none"
}
取消当前移动动作
curl -X PATCH \
-H "Content-Type: application/json" \
-d '{state: "cancelled"}' \
http://192.168.25.25:8090/chassis/moves/current
{ "state": "cancelled" }
移动失败原因
fail_reason 字段是一个数字代码,指示移动动作失败的原因。
enum MoveFailReason {
none = 0, // 无
unknown = 1, // 未知原因
GetMapFailed = 2, // 获取地图失败 (WorldMap)
StartingPointOutOfMap = 3, // 起点在地图外
EndingPointOutOfMap = 4, // 终点在地图外
StartingPointNotInGround = 5, // 起点不在可行驶区域
EndingPointNotInGround = 6, // 终点不在可行驶区域
StartingEqualEnding = 7, // 起点和终点相同
CalculateGlobalPathExtendedDataError = 8, // 计算全局路径扩展数据失败
CalculationFailed = 9, // 道路不通
CalculationTimeout = 10, // 计算超时
NoGlobalPath = 11, // 无可用全局路径
NotGrabStartIndexOnGlobalPath = 12, // 未能在全局路径上抓取起点
NotGrabEndIndexOnGlobalPath = 13, // 未能在全局路径上抓取终点
PlanningTimeout = 14, // 路径规划长时间不成功
MoveTimeout = 15, // 路径规划成功,移动超时
ControlCostmapError = 16, // 局部避障地图数据错误,传感器数据异常
PowerCableConnected = 17, // 当前正连接线缆充电
RotateTimeout = 18, // 旋转超时
ChargeRetryCountExceeded = 100, // 充电重试次数超限
ChargeDockDetectionError = 101, // 充电桩检测错误
ChargeDockSignalError = 102, // 未收到充电桩对接成功信号
InvalidChargeDock = 103, // 充电桩位置无效
AlreadyInCharging = 104, // 当前已在充电中
NoChargeCurrent = 105, // 接触后长时间未收到充电电流
InvalidCabinetPos = 200, // 柜体位置无效
CabinetDetectionError = 201, // 柜体检测错误
NoDockWithConveyer = 202, // 当前未与接驳线对接
NoApproachConveyer = 203, // 当前未靠近接驳线
ElevatorPointOccupied = 300, // 电梯点被占用
ElevatorClosed = 301, // 电梯已关闭
ElevatorPointObscuredTimeout = 302, // 电梯点长时间被遮挡
ElevatorPointOccupancyDetectionTimeout = 303, // 电梯点占用检测超时
ElevatorEnterProgressUpdateTimeout = 304, // 进电梯进度更新超时
InvalidTrackPoints = 400, // 轨迹点无效(输入坐标数不是偶数或轨迹点数 < 2)
TooFarFromStartOfTrack = 401, // 距离轨迹起点太远
InvalidRackDetectionPos = 500, // 货架检测点无效
RackDetectionError = 501, // 货架检测错误
RackRetryCountExceeded = 502, // 对接重试次数超限
UnloadPointOccupied = 503, // 卸货点被占用
UnloadPointUnreachable = 504, // 卸货点不可达
RackMoved = 505, // 货架发生了明显移动
JackInUpState = 506, // 顶升处于升起状态
InvalidRackAreaId = 507, // 货架区域 ID 无效
InvalidRackArea = 508, // 货架区域无效(无货架位)
UnknownRackSpaceState = 509, // 货架空间状态未知
NoRackInRackArea = 510, // 货架区域内无货架
AlignFailedInRackArea = 511, // 在有货架的区域内对接失败
NoFreeSpaceInRackArea = 512, // 货架区域内无空闲空间
FailedToUnloadInRackArea = 513, // 在有空闲货架位的区域内卸货失败
FollowFailed = 600, // 跟随目标丢失
PoiDetectionError = 700, // POI 检测错误
PoiUnreachable = 701, // POI 不可达
BarcodeDetectionError = 702, // 条码检测错误
PlatformAlertError = 1000, // 系统异常
ServiceCallError = 1001, // 服务调用错误 (restapi 使用层)
InternalError = 1002, // 内部 ASSERT 错误
MapChanged = 1003, // 任务执行期间地图发生变化或被清除
MoveActionTypeDeprecated = 1004, // 接口已废弃
}
更及时的版本请访问 此 URL。