Robot Admin (单机版)
Robot Admin(单机版)是一个纯前端网站(HTML + JavaScript),直接由机器人提供服务。
它通过机器人的 REST API 与机器人进行交互。通过观察它的操作,您可以快速学习如何利用这些 API。
这是一个可选软件包。安装后,可以通过 http://机器人IP:8090/rb-admin/ 访问。
使用用户名和密码登录(默认通常为 guest@autoxing.com 和 autoxing)。 登录后,您可以执行各种任务,包括:
- 创建新地图
- 浏览现有地图并选择其中一张作为当前地图
- 设置机器人的当前位置
- 创建移动动作以导航机器人
- 可视化传感器数据(激光雷达点云、深度相机点云、RGB 相机回传等)
- 校准传感器
- 查看警报和动作日志
- 保存 bag 文件(用于错误报告)
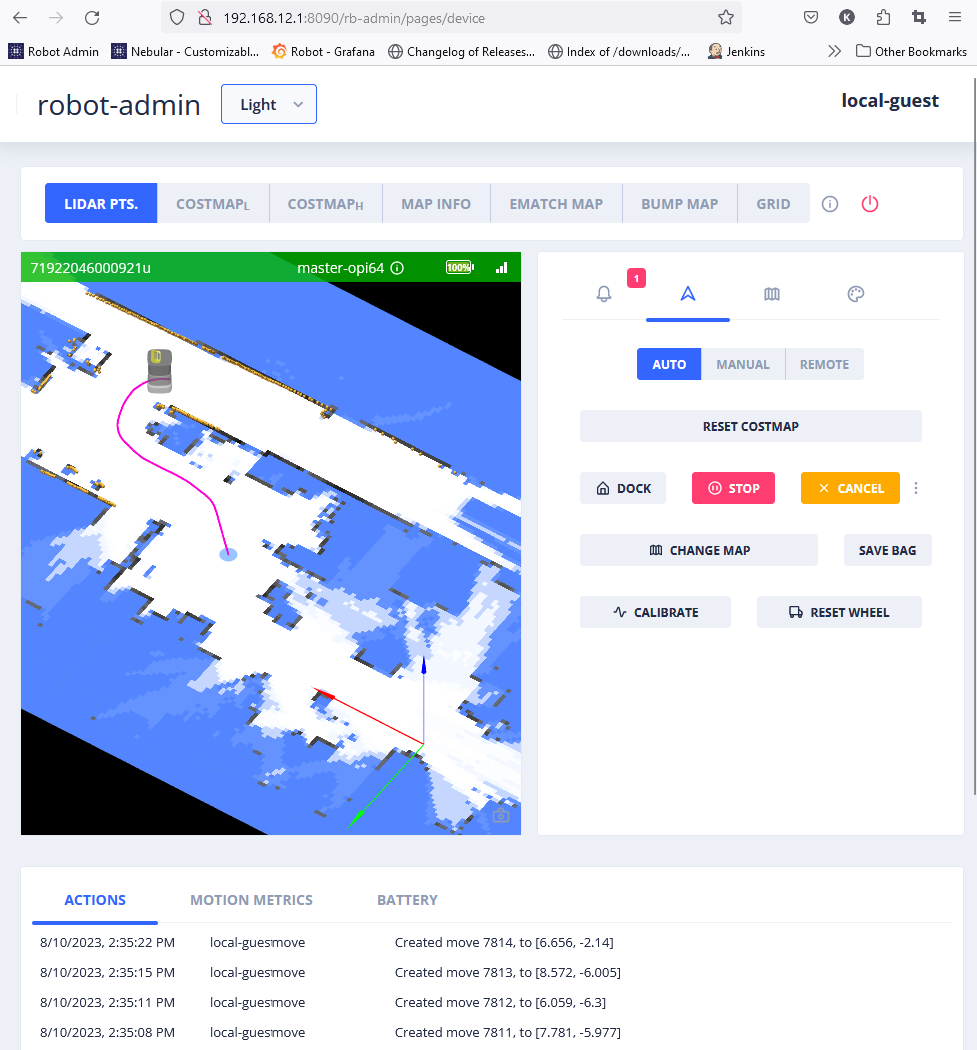
UI 概览
可视化主题栏

- LIDAR PTS - 激光雷达点。
- COSTMAP(l) - 低分辨率代价地图。
- COSTMAP(h) - 高分辨率代价地图。
- MAP INFO - 虚拟墙、充电桩、电梯区域等。
- EMATCH MAP - 环境匹配地图,显示自初始建图以来的环境变化程度。
- BUMP MAP - 可视化机器人在移动过程中感知到的颠簸程度。
- GRID - 1m x 1m 网格线。
控制选项卡

从左到右依次为:
- Alerts - 显示机器人警报。
- Control - 当此选项卡在 "AUTO"(自动)模式下处于活动状态时,您可以双击地图以移动机器人。
- Mapping - 用于创建新地图。
- More Visualization Options - 提供对更多传感器数据的访问。
动作面板

常用任务
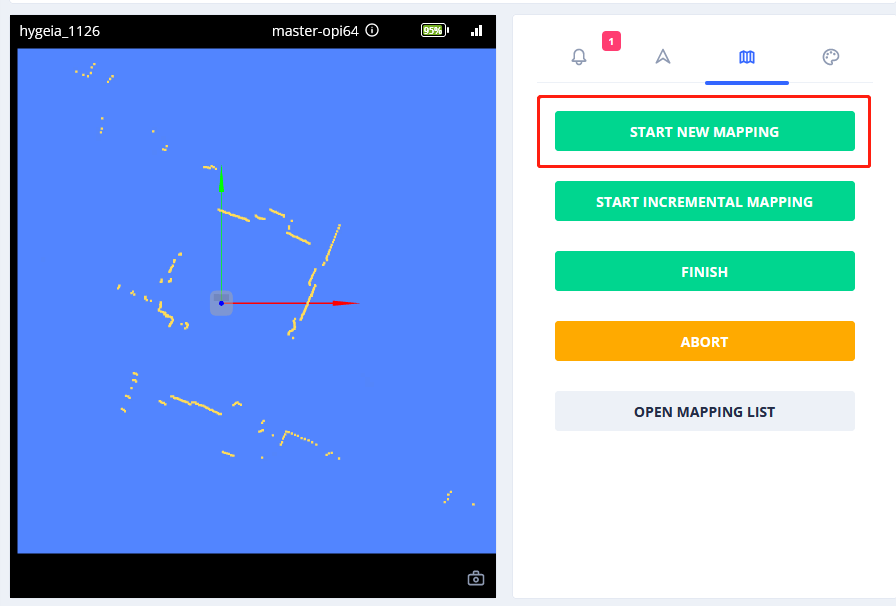
远程创建新地图
- 开启
LIDAR PTs。 - 切换到第三个选项卡,点击 "START NEW MAPPING"(开始新建图)。机器人将进入建图模式。
- 切换到第二个选项卡并选择 "Auto"(自动)模式。
- 双击机器人周围的空闲空间(由白色区域指示)。
- 持续移动机器人,直到地图构建完成。
- 切回第三个选项卡:
- 如果只想临时使用地图而不保存,点击 "ABORT"(放弃)。
- 如果要永久保存地图,点击 "FINISH"(完成)。它将被存储在 "Mapping List"(扫描任务列表)中。
点击 "ABORT" 或 "FINISH" 后,机器人将切换到定位模式,允许您在刚才创建的地图中进行导航。
要重复使用新创建的地图:
- 选择 "OPEN MAPPING LIST"(打开扫描任务列表)查看所有建图任务。
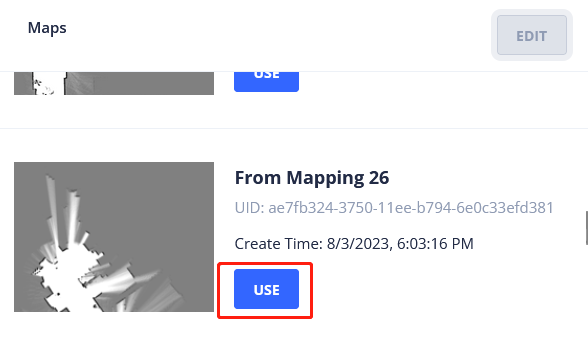
- 在某个建图任务(例如 "mapping 26")上点击 "SAVE"(保存),将其保存到 "Map List"(地图列表)中。
- 切换到第二个选项卡,点击 "CHANGE MAP"(更换地图),然后在所需地图(例如 "Mapping 27")上点击 "USE"(使用)。
设置机器人的当前位置
点击机器人即可显示“调整工具栏”。
自动全局定位
使用“自动全局定位”按钮自动确定机器人的位置。 在较大的地图上,这可能需要一些时间。
- 如果成功,机器人的位置将自动更新。
- 如果系统不确定,您必须在确认激光雷达点与地图完美对齐后,手动点击 "CONFIRM"(确认)。
- 如果系统无法确定位置,该过程将失败。
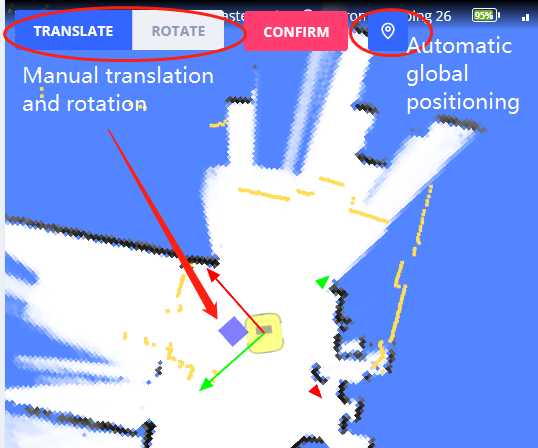
手动定位
点击 "TRANSLATE"(平移)或 "ROTATE"(旋转),然后拖动光标手动移动或旋转机器人。