WebSocket 参考 (WebSocket Reference)
Topic 用于接收机器人的实时信息。 使用以下命令开始或停止监听特定的 Topic。
{"enable_topic": "TOPIC_NAME"}
{"disable_topic": "TOPIC_NAME"}
自 2.7.0 版本起,支持同时启用多个 Topic。这需要 supportsEnableTopicList 能力标志。
{"enable_topic": ["/actions", "/alerts", "/tracked_pose"]} // 自 2.7.0 起
{"disable_topic": ["/actions", "/alerts", "/tracked_pose"]} // 自 2.7.0 起
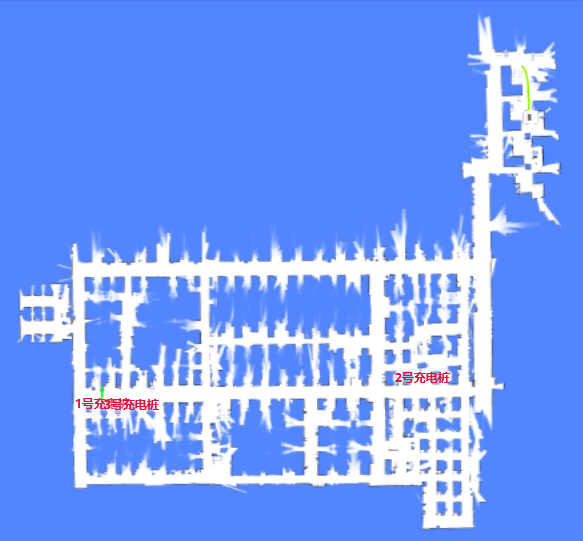
地图 (Map)
在纯定位模式下,/map Topic 包含当前使用的地图,且仅更新一次。
在建图模式下,地图会以较短的固定间隔更新。
{
"topic": "/map",
"resolution": 0.1, // 单个像素的宽/高,单位:米。
"size": [182, 59], // 图像尺寸,单位:像素。
"origin": [-8.1, -4.8], // 左下角像素的世界坐标。
"data": "iVBORw0KGgoAAAANSUhEUgAAALYAAAA7BAAAAA..." // Base64 编码的 PNG 文件。
}
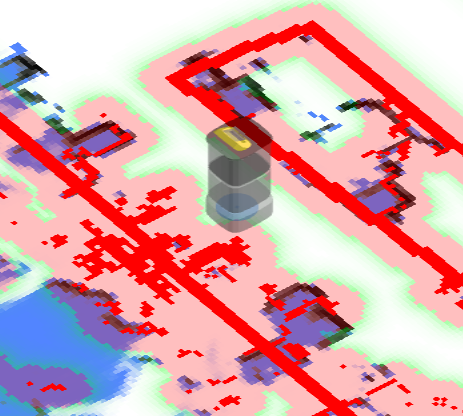
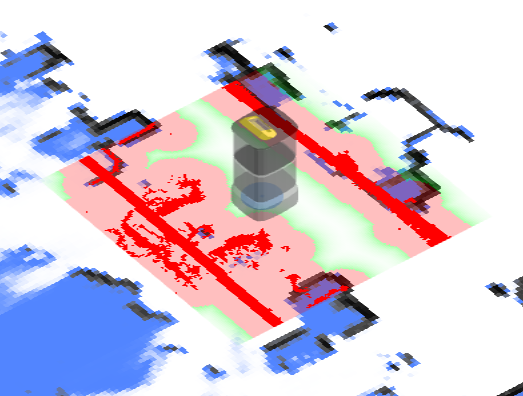
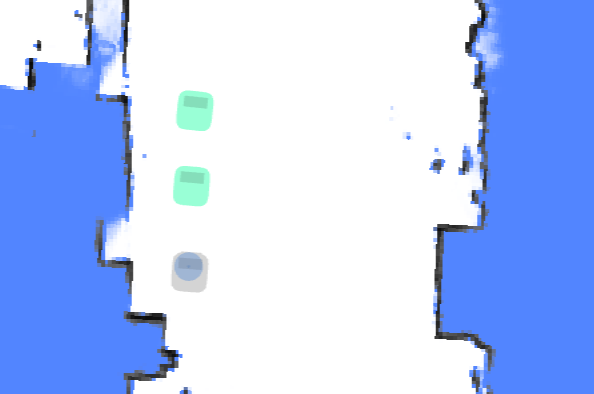
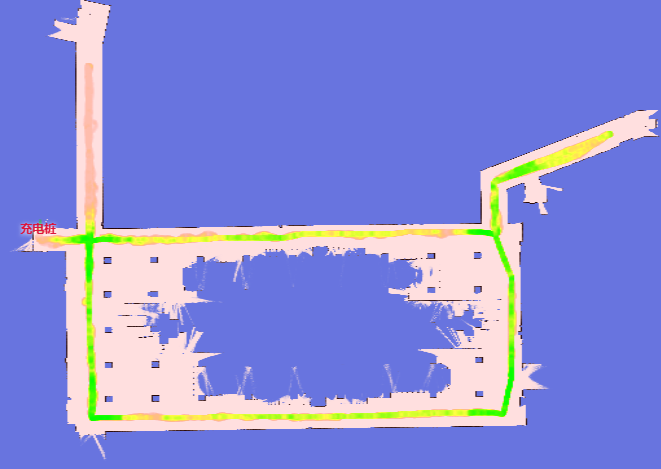
障碍物地图 (Obstacle Map)
显示机器人周围检测到的障碍物,包括来自所有传感器的数据和虚拟墙。
此功能主要用于调试,通过机器人的传感器视角提供观察。
深红色像素代表实际障碍物,而浅红色像素是根据机器人的内切圆半径扩充的。机器人的中心永远不应进入红色区域;否则表示发生了碰撞。
| 低分辨率代价地图 (Low Res. Costmap) | 高分辨率代价地图 (High Res. Costmap) |
|---|---|
| /maps/5cm/1hz | /maps/1cm/1hz |
| 用于路径规划。 | 用于碰撞检测。 |
 |  |
{
"topic": "/maps/5cm/1hz", // 或 '/maps/1cm/1hz'
"resolution": 0.05,
"size": [
200,
200
],
"origin": [
-2.8,
-6.2
],
"data": "iVBORw0KGgoAAAANSUhEUgAAAMgAAADICA..." // Base64 编码的 PNG 文件。
}
车轮状态 (Wheel State)
{
"topic": "/wheel_state",
"control_mode": "auto", // auto/remote/manual (自动/远程/手动)
"emergency_stop_pressed": true, // 是否处于急停模式。
// 可选。仅由特定机器人型号支持。
// 某些车轮带有释放轮子的连线。
// 此标志反映该连线是否处于激活状态。
"wheels_released": true
}
定位状态 (Positioning State)
{
"topic": "/slam/state",
// inactive: 空闲。未在建图,且未设置地图。
// slam: 正在建图。
// positioning: 已设置地图,机器人处于定位状态。
"state": "positioning",
"nav_sat_state": "no_fix", // 自 3.14 起。no_fix, sat_base 或 rtk_fixed
"reliable": true, // false 表示位置丢失。
// "lidar_reliable = False" 表示新创建的观测值(子图)与当前静态地图之间不存在约束。
//
// 位置丢失的步骤如下:
// 1. 不存在约束(在新观测值与静态地图之间);"lidar_reliable" 变为 false。
// 2. 机器人进入纯死推(Dead-reckoning)模式,"position_loss_progress" 开始增加。
// 3. 移动一段距离后,如果创建了新约束,"lidar_reliable" 变为 true。
// 然而,如果 "position_loss_progress" 达到 1.0,"reliable" 也会变为 false。
"lidar_reliable": false, // 自 2.11.0-rc18 起
"position_loss_progress": 0.35, // 自 2.11.0-rc18 起。仅在 lidar_reliable = false 时存在。
// 定位质量(实验性)。
//
// 仅在定位状态下有效。
// 自 2.3.0 起。
// 0 - 未知 (unknown)
// 1 - 丢失 (lost)
// 3 - 差 (poor)
// 8 - 好 (good)
// 10 - 极好 (excellent)
"position_quality": 10,
// 当前激光雷达点云与静态地图的匹配程度。
"lidar_matching_score": 0.545,
// 其他调试标志。
"lidar_matched": true,
"wheel_slipping": false,
"inter_constraint_count": 27,
"good_constraint_count": 27
}
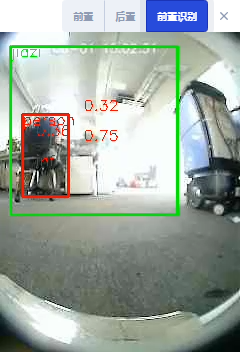
视觉检测对象 (Vision Detected Objects)
注意
实验性功能
enum VisualObjectLabel {
none = 0,
person = 1, // 人
platformHandTruck = 2, // 平台手推车
scaffold = 3, // 脚手架
queueStand = 4, // 排队隔离带
portableGrandstand = 5, // 便携式看台
}
{
"topic": "/vision_detected_objects",
"boxes": [
{
"pose": { "pos": [0.32, 0.97], "ori": 0.0 }, // 物体的位置和朝向。
"dimensions": [0.0, 0.0, 0.0], // 物体的宽、长、高。
"value": 0.8005573153495789,
"label": 1 // VisualObjectLabel
},
{
"pose": { "pos": [0.63, 1.08], "ori": 0.0 },
"dimensions": [0.0, 0.0, 0.0],
"value": 0.5348057150840759,
"label": 1
},
{
"pose": { "pos": [0.51, 0.74], "ori": 0.0 },
"dimensions": [0.0, 0.0, 0.0],
"value": 0.41888049244880676,
"label": 1
}
]
}
电池状态 (Battery State)

{
"topic": "/battery_state",
"secs": 1653299708, // 时间戳。
"voltage": 26.3, // 电池电压。
"current": 3.6, // 电池电流。通常充电时为负,运行时为正。
"percentage": 0.64, // 电池百分比。
"power_supply_status": "discharging" // charging/discharging/full (充电/放电/充满)。
}
详细电池状态 (Detailed Battery State)
自 2.11.0 起
{
"topic": "/detailed_battery_state",
"secs": 1653299708, // 时间戳。
"voltage": 26.3, // 电池电压。
"current": 3.6, // 电池电流。通常充电时为负,运行时为正。
"percentage": 0.64, // 电池百分比。
"power_supply_status": "discharging", // charging/discharging/full。
"cell_voltages": [4.141, 4.138, 4.139, 4.133, 4.136, 4.138, 4.138],
"capacity": 14.0, // Ah
"design_capacity": 15.0, // Ah
"state_of_health": 0.93, // 百分比。
"cycle_count": 80
}
当前位姿 (Current Pose)
世界坐标系下的当前位姿。
{
"topic": "/tracked_pose",
"pos": [3.7325, -10.8525],
"ori": -1.56 // 朝向。正 X 轴为 0,正 Y 轴为 pi/2。
}
规划状态 (Planning State)
返回最近一次移动动作的执行状态。
enum ActionType {
none,
standard,
charge, // 充电
along_given_route, // 沿指定轨迹移动。
return_to_elevator_waiting_point, // 用于进入电梯失败时。
enter_elevator, // 进入电梯
leave_elevator, // 离开电梯
pull_over, // (不建议使用) 靠边停车以避让其他机器人。
align_with_rack, // (不建议使用)
}
enum MoveState {
none,
idle, // 空闲
moving, // 移动中
succeeded, // 成功
failed, // 失败
cancelled, // 已取消
}
enum StuckState {
move_stucked, // 移动受阻
target_spin_stucked, // 目标旋转受阻
}
{
"topic": "/planning_state",
"map_uid": "xxxxxx", // 当前地图的 UID。
// action (动作)
"action_id": 3354,
"action_type": "enter_elevator", // 见 ActionType (自 2.5.2 起)。
"move_state": "moving", // 见 MoveState。
"fail_reason": 0, // 当 move_state == failed 时有效。
"fail_reason_str": "none", // 当 move_state == failed 时有效。
"remaining_distance": 2.8750057220458984, // 单位:米。
// 目标相关
"target_poses": [
{
"pos": [4.08, 2.99],
"ori": 0
}
],
// 意图相关
"move_intent": "", // 已被 `action_type` 废弃。
"intent_target_pose": {
// 当前目标的位姿。
"pos": [0, 0],
"ori": 0
},
// 受阻状态
"stuck_state": "move_stucked", // 见 StuckState (自 2.5.2 起)。
"in_elevator": true, // 可选 (自 2.5.2 起)。
"viewport_blocked": true, // 可选 (自 2.5.2 起)。
// 可选 (自 2.9.0 起)。
// 目的地被其他机器人占用,因此在路边等待。
"is_waiting_for_dest": true,
"docking_with_conveyer": true, // 可选 (自 2.9.0 起)。
// 可选 (自 2.11.0 起)。默认为 0。
// 仅在沿指定路线移动时有效。
// 表示已经通过的点数量。
"given_route_passed_point_count": 3
}
激光雷达点云 (LiDAR Point Cloud)
用于 SLAM 的点云 (Point Cloud Used for SLAM)
来自一个或多个用于 SLAM 的激光雷达设备(如果有)的组合点云。 坐标位于世界坐标系中。
{
"topic": "/scan_matched_points2",
"stamp": 1653302201889,
"points": [
[7.83, 3.84, 0.04],
[7.8, 3.88, 0.04],
[7.79, 4.14, 0.04]
...
]
}
单个激光雷达设备的点云 (Point Cloud for Individual LiDAR Devices)
自 2.12.0 起
此 Topic 用于调试单个激光雷达设备。 坐标位于世界坐标系中。
常用的 Topic 名称 include:
/horizontal_laser_2d/matched
/left_laser_2d/matched
/right_laser_2d/matched
/lt_laser_2d/matched (左前上)
/rb_laser_2d/matched (右后下)
{
"topic": "/horizontal_laser_2d/matched",
"stamp": 1741764468.939,
"fields": [
{
"name": "x",
"data_type": "f32"
},
{
"name": "y",
"data_type": "f32"
},
{
"name": "z",
"data_type": "f32"
},
{
"name": "intensity",
"data_type": "f32"
}
],
"data": "QphAQHPLmkHDpvk/xcTEPk+RQED22ppBp6..." // Base64 编码的二进制数据。
}
全局路径 (Global Path)
当前全局路径。

{
"topic": "/path",
"stamp": 1653301966860,
"positions": [
[0.94, 0.27, 0.01], // 航向角(第 3 个成员)在 2.12.0 版本中添加。
[0.94, 0.25, 0.01],
[0.96, 0.25, 0.01]
]
}
轨迹 (Trajectory)
机器人的行驶轨迹。
- 在建图模式下,轨迹代表整个建图过程的完整路径。
- 在纯定位模式下,轨迹会定期被修剪。

注意
对于 2.5.0 或更低版本,此启用消息被错误地命名为 /trajectory_node_list。 为保险起见,请同时启用 /trajectory 和 /trajectory_node_list。
{
"topic": "/trajectory",
"points": [
[2.0, 3.0],
[2.1, 3.1],
[2.4, 3.0],
[2.7, 2.9],
[3.0, 2.8],
[3.6, 2.6],
[3.7, 2.5],
[3.9, 2.3],
[4.1, 2.1],
[3.9, -1.1],
[3.8, -2.2]
]
}
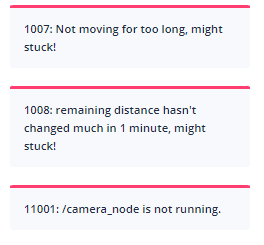
报警 (Alerts)
此 Topic 包含当前处于激活状态的报警。
应用程序应监控报警并采取适当措施,例如:
- 当电量低时返回充电桩 (8501),或在电量极低时关闭机器人 (8003)。
- 向用户发出对接错误警告 (10001, 10002, 10003)。
- 向用户发出潜在的机器人倾翻警告 (4008)。
- 在创建新地图前,向用户发出 IMU 校准错误警告 (4501, 4502)。
- 通知我们应用程序崩溃 (1001, 1002, 1003, 1004, 2001, 3001, 4001, 11001 等)。
- 通知我们传感器错误 (4009, 5001 等)。
报警的完整列表可在此 URL 找到。
{
"topic": "/alerts",
"alerts": [
{
"code": 6004,
"level": "error",
"msg": "Kernel temperature is higher than 80!"
}
]
}
行驶距离 (Traveled Distance)
注意
实验性功能
{
"topic": "/platform_monitor/travelled_distance",
"start_time": 1653303520, // 当前移动的开始时间。
"duration": 60, // 当前移动的执行时间。
"distance": 27.89, // 当前移动过程中行驶的距离。
"accumulated_distance": 5230.0 // 自系统启动以来的总行驶距离。
}
RGB 视频流 (RGB Video Stream)
H.264 编码的数据流。
{
"topic": "/rgb_cameras/front/video",
"stamp": 1653303702.821,
"data": "AAAAAWHCYADAAb5Bv4yqqseHIsjRwL5E4C4uX/CmRcXVaxddV3zf5uZO..."
}

提示
对于浏览器或 Node.js,可以使用 jmuxer 解码该流。 使用 flushingTime: 0 以最小化延迟。
this.jmuxer = new JMuxer({
node: myNativeElement,
mode: "video",
flushingTime: 0,
});
当前 Topic(可能因设备而异):
/rgb_cameras/front/video/rgb_cameras/back/video/rgb_cameras/front_augmented/video: 用于调试基于视觉的对象检测的增强视频流。
RGB 图像流 (RGB Image Stream)
JPEG 编码的图像流。
提示
图像流比 H264 视频流大得多。对于互联网传输,请使用视频流。
{
"topic": "/rgb_cameras/front/compressed",
"stamp": 1653303702.821,
"format": "jpeg",
"data": "YXNkZmFzZndlcndldHNhZGZhc2Rmd2V0cjJ5NDVqdHltNDU2..."
}
当前 Topic:(不同设备可能有所不同)
/rgb_cameras/front/compressed/rgb_cameras/back/compressed
传感器管理状态 (Sensor Manager State)
type PowerState =
| "awake" // 正常运行
| "awakening" // 正在从睡眠恢复到唤醒。通常持续 2-3 秒。
| "sleeping"; // 睡眠时,部分传感器会关闭。
{
"topic": "/sensor_manager_state",
"power_state": "awake" // 见 PowerState
}
机器人模型 (Robot Model)
机器人的轮廓(footprint)可能会动态变化。例如,加载货架后轮廓会变大。 此 Topic 用于获取机器人的动态轮廓。
{
"topic": "/robot_model",
"footprint": [
[0.13, -0.25],
[0.203, -0.228],
[0.235, -0.178],
[0.245, -0.077],
[0.248, 0.029],
[0.243, 0.163],
[0.235, 0.217],
[0.207, 0.26],
[0.17, 0.291],
[0.122, 0.324],
[-0.122, 0.324],
[-0.17, 0.291],
[-0.207, 0.26],
[-0.235, 0.217],
[-0.243, 0.163],
[-0.248, 0.029],
[-0.245, -0.077],
[-0.235, -0.178],
[-0.203, -0.228],
[-0.13, -0.25]
],
// 自 2.12.4 起,expanded_footprint 在机器人周围增加了更多安全区域
"expanded_footprint": [
[-0.245, -0.077],
[-0.235, -0.178],
[-0.203, -0.228],
[-0.13, -0.25]
"..."
]
"width": 0.496
}
附近机器人 (Nearby Robots)
配备专用硬件(可选安装)后,机器人可以感知其他机器人的位置和路径。
此信息可用于避免机器人之间的碰撞或进行编队移动。
{
"topic": "/nearby_robots",
"robots": [
{
"uid": "21922076002353N",
"pose": { "pos": [1.05, 0.08], "ori": 1.69 },
"trend": [],
"footprint_digest": "0150acd9" // 自 2.7.0 起,见 /nearby_robot_footprints
},
{
"uid": "21922076002413T",
"pose": { "pos": [0.19, 0.01], "ori": 1.6 },
"trend": [
[0.19, 0.01],
[0.12, -0.02]
],
"footprint_digest": "7cb254d5"
}
]
}
附近机器人轮廓 (Nearby Robot Footprints)
此 Topic 包含附近机器人的详细轮廓。
在 2.7.0 中,Topic /nearby_robots 增加了 footprint_digest 属性。 它可以与 /nearby_robot_footprints 结合使用,以确定附近机器人的轮廓。
{
"topic": "/nearby_robot_footprints",
"footprints": [
{
"digest": "0150acd9",
"coordinates": [
[0.0, -0.273],
[0.14, -0.27],
[0.2, -0.25],
[0.24, -0.2],
[0.25, -0.1],
[0.25, 0.13],
[0.24, 0.2],
[0.18, 0.26],
[0.15, 0.265],
[0.14, 0.283],
[-0.14, 0.283],
[-0.15, 0.265],
[-0.18, 0.26],
[-0.24, 0.2],
[-0.25, 0.13],
[-0.25, -0.1],
[-0.24, -0.2],
[-0.2, -0.25],
[-0.14, -0.27]
]
}
]
}
里程计状态 (Odom State)
一个调试 Topic,用于可视化激光里程计的协方差。
{
"topic": "/odom_state",
"lidar_odom_reliable": true,
"lidar_odom_cov": [
0.000023889469957794063, -0.00002311983917024918, -0.00002311983917024918,
0.00005866867650183849
]
}
融合传感器状态 (Fused Sensor State)
{
"topic": "/fused_sensor_state",
"slipping": false,
"major_slipping": false,
"pushed": false,
"accelerability": 1,
"suggested_speed": 0.5,
"is_still": true, // 同时满足 odom_still 和 imu_still
"odom_still": true, // 轮速计读数为 0 或接近 0
"imu_still": true // 最近 N 秒内 gyro 各轴积分均低于阈值
}
IMU 状态 (IMU State)
来自 IMU 传感器的原始惯性数据。
{
"topic": "/imu_state",
"calibrate_state": 0,
"calibrate_fail_reason": 0,
"temperature": 62.4,
"angular_velocity_standard_deviation_10s": [0.02175, 0.02393, 0.02442],
"angular_velocity_avg_10s": [0.00021, 0.00191, -0.00253],
"linear_acc_standard_deviation_10s": [0.00517, 0.00535, 0.00575],
"gyro_calibrating": true,
"gyro_bias": [0.00123, 0.00235, 0.00346], // 当前偏差
// 当 gyro_calibrating 为 true 时,
// gyro_bias 将缓慢向此值靠近
"gyro_bias_target": [0.00457, 0.00568, 0.00679]
}
外部 RGB 摄像头数据 (External RGB Camera Data)
如果机器人没有内置 RGB 摄像头,可以安装外部摄像头将数据回传给机器人。这使得监控和基于视觉的功能能够保持运行。
控制通道
收到此 Topic 后,周边设备应:
- 打开相应的摄像头
- 设置所需的分辨率和 FPS
- 通过数据通道回传数据
{
"topic": "/external_rgb_camera_control",
"enabled_devices": [
{
"name": "Front Camera",
"width": 320,
"height": 240,
"fps": 5,
"external_data_topic": "/external_rgb_data/front"
}
]
}
数据通道
使用此通道向机器人发送 RGB 数据。
{
"topic": "/external_rgb_data/front", // 在控制通道的 `external_data_topic` 中指定的 Topic
"format": "jpeg", // 必须为 jpeg
"stamp": 1655896161.012, // 图像的时间戳
"data": "Aasdfwe3424..." // base64 编码的 JPEG 数据
}
全局定位状态 (Global Positioning State)
来自 POST /services/start_global_positioning 服务的反馈。
{
"topic": "/global_positioning_state",
"state": "succeeded",
"score": "82.1",
// 如果为 false,则位姿在全局是唯一的且可信。
// 如果为 true,则环境匹配度不高,
// 或者位姿在全局不是唯一的,应由人工操作员验证。
//
// 如果结果来自成功的 barcode 匹配,
// `needs_confirmation` 始终为 true。
"needs_confirmation": false,
"pose": { "pos": [0.32, 0.97], "ori": 0.0 }, // 物体的位置和朝向。
"message": "Succeeded with barcode R25B13_7"
}
设备信息 (Device Info)
适用于已经建立 WebSocket 连接但不希望进行单独 REST API 请求的客户端。
请求:
{ "topic": "/get_device_info_brief" }
响应:
{
"topic": "/device_info_brief",
"rosversion": "1.15.11",
"rosdistro": "noetic",
"axbot_version": "master-pi64",
"device": {
"model": "waiter"
},
"baseboard": {
"firmware_version": "22032218"
},
"wheel_control": {
"device_type": "amps",
"firmware_version": "amps_20211103"
},
"lidar": {
"model": "ld06"
},
"bottom_sensor_pack": {
"firmware_version": ""
},
"depth_camera": {
"firmware_version": ""
},
"remote_params": {
"tags": [
"ihawk_crossfire",
"RGB_external",
"strongest_lidar_match",
"mute_baseboard_com_output"
]
}
}
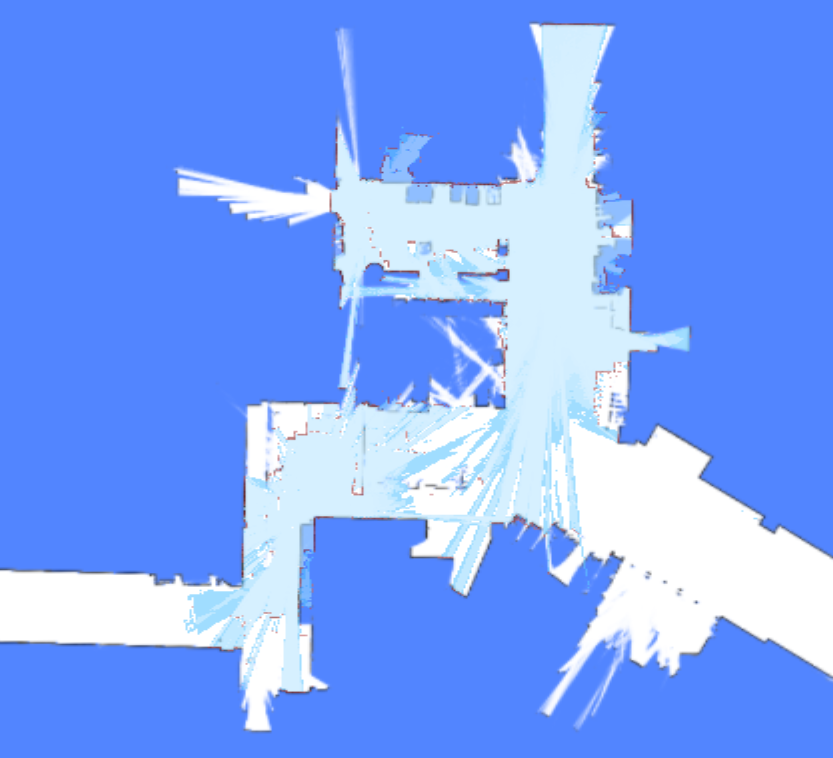
环境匹配地图 (Environment Match Map)
此地图反映了点云与现有地图的匹配程度。
红色区域表示环境发生了变化。如果检测到显著变化(红色区域过多),则应重建地图。
请求:
{ "enable_topic": "/env_match_map" }
响应:
{
"topic": "/env_match_map",
"stamp": 1675326661.915,
"resolution": 0.10000000149011612,
"size": [579, 614],
"origin": [-9.35, -34.75],
"data": "iVBORw0KGgoAAAANSUhEUgAAAkMAA..."
}
环境对称性地图 (Environment Symmetry Map)
此地图反映了点云相对于当前环境的对称程度。
红色表示特征缺失的环境,如隧道或宽敞的大厅。
请求:
{ "enable_topic": "/env_symmetry_map" }
响应:
{
"topic": "/env_symmetry_map",
"stamp": 1674993781.916,
"resolution": 0.10000000149011612,
"size": [579, 614],
"origin": [-9.35, -34.75],
"data": "iVBORw0KGgoAAAANSUhEUgAAAkMAAAJmCAAAAAB..."
}
局部路径 (Local Path)
此 Topic 用于调试。
{
"topic": "/local_path",
"width": 1.1,
"color": "##FFEACD50", // RRGGBBAA
"poses": [
[1, 2, 3], // x, y, 朝向
[3, 4, 3] // x, y, 朝向
]
}
顶升状态 (Jack State)
顶升设备的状态。
{
"topic": "/jack_state",
"state": "hold", // unknown, hold, jacking_up, jacking_down (未知, 保持, 正在上升, 正在下降)
"progress": 0.35, // 顶升设备的位置,百分比表示
"self_checking": false,
"self_check_state": "no_error" // no_error, up, down, error, unknown (无错误, 上, 下, 错误, 未知)
}
增量地图 (Incremental Map)
增量建图可增强在动态或频繁变化环境中的定位。此 Topic 显示最新更新的地图。可以在 RobotAdmin 显示面板中启用它。
虽然 Topic 中的图像是灰度的,但 RobotAdmin 会转换这些颜色:红色像素代表新障碍物,浅蓝色像素代表新清理出的空间。
{
"topic": "/incremental_map",
"stamp": 1693570082.777,
"resolution": 0.05000000074505806,
"size": [638, 881],
"origin": [-21.95, -1.25],
"data": "iVBORw0KGgoAAAANSUhEUgAAAn4AAANxBAAAAACaa..."
}
缓存 Topic (Cached Topics)
为了处理非常大的地图,/map_v2、/map/costmap_v2 和 /incremental_map_v2 使用 data_url 代替 data。
这显著减少了通过 WebSocket 传输的数据量。图像包含 Cache-Control: public, max-age= 和 ETag 响应头,允许浏览器和服务器进行有效的缓存。
{
"topic": "/map_v2",
"stamp": 1693570028.939,
"resolution": 0.05000000074505806,
"size": [661, 1256],
"origin": [-8.25, -36.05],
"data_url": "static-files/map-d69c26ec2bdff8dad76fe6e8d3fa65d9b3041fc669ee3c0a96f7b544473fcec0.png"
}
随后可访问 http:://192.168.25.25:8090/static-files/map-d69c26ec2bdff8dad76fe6e8d3fa65d9b3041fc669ee3c0a96f7b544473fcec0.png 获取图像。
$ curl -I http://192.168.25.25:8090/static-files/map-d69c26ec2bdff8dad76fe6e8d3fa65d9b3041fc669ee3c0a96f7b544473fcec0.png
HTTP/1.1 200 OK
date: Fri, 01 Sep 2023 12:20:04 GMT
server: uvicorn
Content-Type: image/png
ETag: d69c26ec2bdff8dad76fe6e8d3fa65d9b3041fc669ee3c0a96f7b544473fcec0
Cache-Control: public, max-age=2592000
Vary: Accept, Cookie
Allow: GET, HEAD, OPTIONS
X-Page-Generation-Duration-ms: 18
X-Frame-Options: DENY
Content-Length: 141733
X-Content-Type-Options: nosniff
Referrer-Policy: same-origin
Cross-Origin-Opener-Policy: same-origin
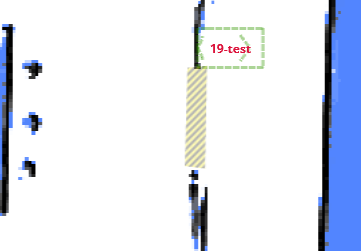
收集的 Barcode (Collected Barcode)
此 Topic 用于收集 barcode。这是一个 latched topic(常驻话题),只要机器人运行中,就会持续监测。 如果没有检测到,status 为 no_result;如果检测到且能准确识别,status 为 ok。 如果检测到,但目标太远或角度不佳,会返回 too_far、unaligned_with_robot 等状态。
{
"topic": "/collected_barcode",
"state": "unknown|ok|no_result|not_unique|too_far|unaligned_with_robot",
"barcode": {
"id": "D2_125",
// barcode 的全局位姿,定义为其物理中心。
// 必须已设置地图和位姿,才会返回全局位姿。
"pose": { "pos": [-14.842, 17.595], "ori": -1.457 },
// 自 2.9.1 起
// 仅在机器人不移动时准确
"relative_pose": { "pos": [-1.992, -0.092], "ori": -0.312 }
}
}
如果要将收集到的 barcode 用于全局定位或精准对接,需要将其添加到地图的 overlays 中。参见 overlays。添加后即可通过 start_global_positioning 使用。
检测到的货架 (Detected Rack)
{
"topic": "/detected_rack",
"rack_detected": true,
"frame": "map", // 可选,当 `rack_detected` 为 true 时有效
// 可选,当 `rack_detected` 为 true 时有效
"rack_box": {
"pose": {
"pos": [0.0, 0.0],
"ori": 0.0
},
"width": 0.64324,
"height": 0.69234
},
// 可选,当 `rack_detected` 为 true 时有效
"rack_box_aligned": {
"pose": {
"pos": [0.0, 0.0],
"ori": 0.0
},
"width": 0.66,
"height": 0.7
}
}
检测到的货架状态 (Detected Rack States)
机器人附近货架的实时观测结果,通常频率为 1–2 Hz。此 Topic 不进行缓存 (NOT latched) ——每条消息仅包含机器人传感器当前观测到的货架。后端会将其累积到 /map_rack_states 中。
{
"topic": "/detected_rack_states",
"map_uid": "a1b2c3d4",
"racks": [
{
"poi_id": "rack_001",
"levels": [
{
"timestamp_ns": 1712345678000000000,
"level": 1,
"state": "occupied"
}
]
}
]
}
map_uid— 货架跟踪所在的地图 ID。racks— 观测到的货架状态数组。poi_id— 货架兴趣点的唯一标识符。levels— 多层货架各层的占用状态。state— 取值为unknown、occupied或free。
货架地图状态 (Map Rack States)
所有已知货架的累积完整状态。已缓存 (Latched) ——缓存最新状态,让后订阅的订阅者能立即获取当前数据,而不仅仅是未来的更新。约 30 分钟未观测到的货架将变为 unknown 并被移除。
{
"topic": "/map_rack_states",
"map_uid": "a1b2c3d4",
"racks": [
{
"poi_id": "rack_001",
"levels": [
{
"timestamp_ns": 1712345678000000000,
"level": 1,
"state": "occupied"
},
{
"timestamp_ns": 1712345678000000000,
"level": 2,
"state": "free"
}
]
}
]
}
跟随目标状态 (Follow Target State)
此 Topic 用于跟随移动目标。
用户应以固定的速率(约 2–4 Hz)将此消息发送给机器人。
{
"topic": "/follow_target_state",
"follow_state": "follow_pose|pause|fail",
"target_pose": {
// 当 follow_state == follow_pose 时有效
"pos": [1.1, 2.2], // 可选。位姿可以仅包含位置 (pos) 或朝向 (ori)
"ori": 1.2 // 可选。位姿可以仅包含位置 (pos) 或朝向 (ori)
}
}
follow_state 有以下几种取值:
follow_pose: 移动到指定的target_posepause: 保持机器人静止fail: 将当前动作标记为失败。若要重新开始跟随,请启动另一个动作。
机器人信号 (Robot Signal)
自 2.8.0 起,需要 caps.supportsRobotSignal。
指示机器人是否正在左转、右转或制动的信号灯。
{
"topic": "/robot_signal",
"turn_left": true, // 正在左转
"turn_right": false, // 正在右转
"brake": false, // 正在制动
"reverse": false // 正在倒车
}
附近自动门 (Nearby Auto Doors)
此 Topic 用于可视化自动门的状态。
{
"topic": "/nearby_auto_doors",
"doors": [
{
"name": "Abc",
"mac": "123",
"state": "closed",
"polygon": [
[2.937, 3.875],
[2.899, 2.368],
[3.208, 2.329],
[3.237, 3.904]
]
}
]
}
触碰限位状态 (Bumper State)
自 2.9.0 起
机器人周围防撞条传感器的状态。
{
"topic": "/bumper_state",
"front_bumper_pressed": false,
"rear_bumper_pressed": false
}
辊道状态 (Roller State)
自 2.9.0 起
辊道的当前状态。
{
"topic": "/roller_state",
"state": "hold" // unknown, hold, loading, unloading (未知, 保持, 正在装货, 正在卸货)
}
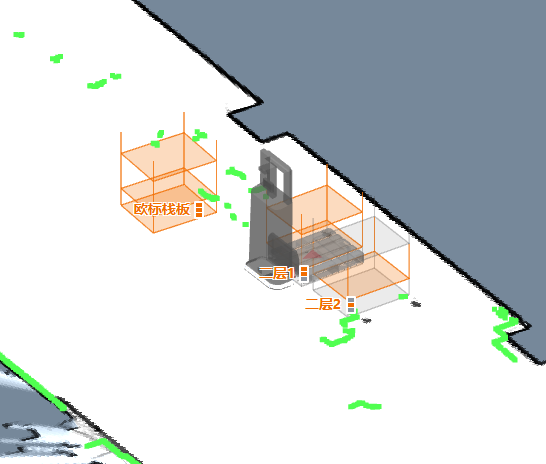
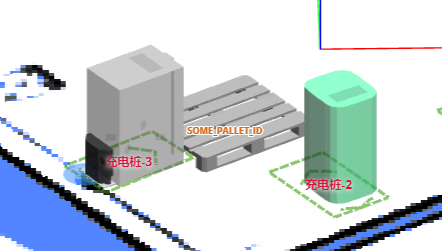
检测到的托盘 (Detected Pallets)
自 2.10.0 起
关于检测到的托盘的信息。

{
"topic": "/detected_pallets",
"pallets": [
{
"frame": "map",
"pallet_id": "SOME_PALLET_ID",
"pose": {
"pos": [120.0, 50.0],
"ori": 1.618
},
"size": {
"width": 1.0,
"depth": 1.3,
"height": 0.3,
"pocket_width": 0.3,
"pocket_height": 0.2,
"pocket_spacing": 0.2
}
}
]
}
地标 (Landmarks)
自 2.11.0 起
此 Topic 用于可视化在建图过程中识别到的地标。
{
"topic": "/landmarks",
"landmarks": [
{
"id": "landmark_1",
"pos": [0.32, 0.97],
"in_use": true
}
]
}
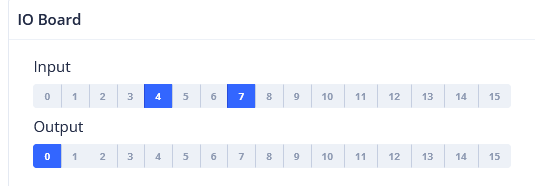
数字输入/输出 (Digital Input/Output)
(讨论中)
IO 板是一个专用硬件组件,通过 USB 端口连接到机器人。它支持 16 个或更多工作在 12V 或 24V 的 IO 引脚。某些 IO 引脚预定义了功能(如刹车灯或转向信号灯),而其他引脚可以由用户控制。
IO 引脚的状态:
{
"topic": "/io_pins_state",
"inputs": [
[0, 0, 1, 1, 1, 0, 0, 0],
[0, 0, 1, 1, 0, 0, 0, 0]
],
"outputs": [
[0, 0, 1, 1, 1, 0, 0, 0],
[0, 0, 1, 1, 0, 0, 0, 0]
]
}
完整更新输出引脚:
{
"topic": "/set_output_pins",
"outputs": [
[0, 0, 1, 1, 1, 1, 0, 0, 0],
[0, 0, 1, 1, 1, 0, 0, 0, 0]
]
}
选择性更新输出引脚:
{
"topic": "/modify_output_pins",
"enable": [0, 9, 13],
"disable": [2, 4, 6]
}
推手状态 (Push Handle State)
{
"topic": "/push_handle_state",
"mode": "idle", // idle, push, drive (空闲, 推动, 驱动)
"left_activated": false,
"right_activated": false,
"calibrating": true // 可选。仅在为 true 时存在
}
检测到的挂车 (Detected Trailer)

{
"topic": "/detected_trailer",
"detected": true,
"hitch_position": [0, -0.35], // 相对于机器人位姿。
"hitch_arm_length": 0.4, // 连接臂长度。
"width": 0.5, // 挂车宽度。
"depth": 1.0, // 挂车深度(长度)。
"pose": {
// 挂车的位姿,相对于机器人。
"pos": [0.31, -0.85],
"ori": 0.13
}
}
深度摄像头图像 (Depth Camera Images)
自 2.12.0 起
{
"topic": "/depth_camera/downward/image",
"size": [160, 100],
"data": "iVBORw0KGgoAAAANSUhEUgAAALYAAAA7BAAAAA..." // Base64 编码的 PNG 文件。
}
常用的 Topic 名称包括:
/depth_camera/downward/image
/depth_camera/upward/image
/depth_camera/forward/image
更新的地图切片 (Updated Map Slice)
{
"topic": "/updated_map_slice",
"width": 298,
"height": 356,
"resolution": 0.05,
"origin_x": -4.4,
"origin_y": -9.0,
"data": "iVBORw0KGgoAAAANSUhEUg..." // Base64 编码的灰度 PNG。
}
裸 IO 板状态 (Raw Io-board State)
IO 板当前输入和输出的原始状态。
rtn = {
"topic": "/raw_io_board_state",
"inputs_active": [1, 0, 0, 1, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 0, 0, 1],
"outputs_active": [1, 0, 0, 1, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 0, 0, 1],
}
V2X 健康状态 (V2X Health State)
此 Topic 提供 V2X 信标的健康状态,包括消息接收速率和激活状态。
{
"topic": "/v2x_health_state",
"test_time_window": 10.0, // 测试信标健康的窗口时间,单位:秒。
"rate": 2, // 期望的每秒消息速率。
"beacon_ids": ["beacon_001", "beacon_002", "beacon_003"], // 信标标识符列表。
"beacon_message_counts": [18, 19, 3], // 在测试窗口内收到每个信标的消息数量。
"beacon_active_states": [true, true, false] // 每个信标的激活状态(如果按预期速率接收消息则为 true)。
}
CHC 导航状态 (GNSS/INS) (CHC NavState (GNSS/INS))
自 master(尚未正式发布)起。
来自 /devpvt Topic 上的 CHC (华测) GNSS/INS 传感器的原始导航数据。
{
"topic": "/devpvt",
"speed": 0.352, // 地面速度 (m/s)。
"heading": 270.123, // 航迹角 — 车体坐标系下的速度航向,顺时针,[0, 360] 度。
"heading2": 180.654, // 车体坐标系下的双天线航向,顺时针,[0, 360] 度。
// 整体 INS/GNSS 融合状态 (stat[0]):
// init | sat_nav | combined_nav | pure_inertial
"combined_state": "combined_nav",
// GNSS 修复和航向质量 (stat[1]):
// no_fix_no_heading | single_point | pseudorange_diff | combined_dead_reckoning
// rtk_fixed | rtk_float
// single_point_no_heading | pseudorange_diff_no_heading | rtk_fixed_no_heading | rtk_float_no_heading
"gnss_state": "rtk_fixed",
"warning": 0 // 传感器警告掩码 (0 = 无警告)。
}