叠加层 (Overlays)
地图的 overlays 字段采用 GeoJSON 格式。它包含虚拟墙、虚拟区域、自动门、停靠点、货物装载点等。
要更新地图的叠加层,请参阅修改地图。
顶层格式为:
{
"type": "FeatureCollection",
"features": [
{}, // 特征 1
{}, // 特征 2
{} // 特征 3
]
}
每个特征 (feature) 可以是点、折线或多边形。例如,这是一个多边形:
{
"type": "FeatureCollection",
"features": [
{
"id": "SampleGate",
"type": "Feature",
"properties": {
"regionType": 4,
"mac": "30C6F72FAE1C"
},
"geometry": {
"type": "Polygon",
"coordinates": [
[
[-2.702, -5.784],
[-1.007, -5.827],
[-1.053, -6.348],
[-2.546, -6.385]
]
]
}
}
]
}
虚拟墙与虚拟区域
虚拟墙和虚拟区域用于防止机器人进入特定区域。
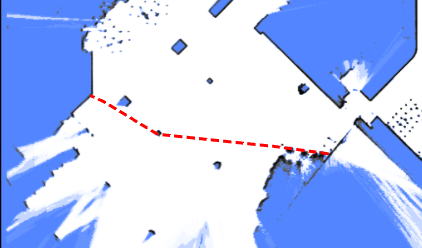
虚拟墙是 LineString 特征。它们防止机器人从一侧穿过到另一侧,常用于引导全局路径计算。
{
"id": "19f0684fdf2b1695054df052e002d8f6",
"type": "Feature",
"properties": {
"lineType": "2",
"mapOverlay": true
},
"geometry": {
"type": "LineString",
"coordinates": [
[-35.0222214524365, -14.968376602837452],
[-35.094466030898275, -22.120589758429787],
[2.4727142286451453, -22.554057221952917],
[2.54495880739114, -15.329599487756695],
[-35.0222214524365, -15.112865751092386]
]
}
}
虚拟区域比虚拟墙更具限制性;如果机器人意外进入虚拟区域,它将无法向任何方向移动。
{
"id": "4d14040ea1ee7dd2e1d778f04a224d7a",
"type": "Feature",
"properties": {
"blocked": false,
"mapOverlay": true,
"regionType": "1"
},
"geometry": {
"type": "Polygon",
"coordinates": [
[
[-87.30882859651956, -43.42832073191971],
[-86.96655334631487, -24.85988841115727],
[0.22327395043930665, -25.754819491083936],
[0.22327395043930665, -44.23768299574249],
[-87.30882859651956, -43.42832073191971]
]
]
}
}
清除区域 (Free Space)
清除区域用于清除地图上的某个区域,允许机器人进入这些区域。 它们通常用于在地图创建后移除多余的障碍物。
{
"id": "e4d544e92262c538dc31e116b630043b",
"type": "Feature",
"properties": {
"blocked": false,
"mapOverlay": true,
"regionType": "12"
},
"geometry": {
"type": "Polygon",
"coordinates": [
[
[1.1439716297445557, -16.400667528273516],
[3.5214924133697423, -16.438682980748354],
[2.9970246447419413, -25.260207920183575],
[0.6399114661803651, -25.07582059422475],
[1.1439716297445557, -16.400667528273516]
]
]
}
}
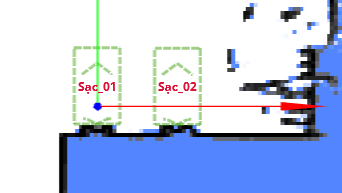
充电桩 (Charger)
充电桩与 charge 移动动作类型配合使用。
{
"id": "642562bcf0e02ee8aff7dea7",
"type": "Feature",
"geometry": {
"type": "Point",
"coordinates": [0, 0]
},
"properties": {
"deviceIds": ["6181307902152yI"],
"dockingPointId": "65655d96f0e02ee8afc9cc5e",
"mapOverlay": true,
"name": "sac_01",
"type": "9",
"yaw": 90
}
}
自动门
定义自动门后,机器人可以开启其路径上的门。 门由多边形表示,且必须包含 mac 属性。
注意
多边形必须包含门移动的所有区域。 如果区域太小,门在开启时可能会与正在等待的机器人发生碰撞。
{
"type": "Feature",
"properties": {
"regionType": 4,
"mac": "30C6F72FAE1C"
},
"geometry": {
"type": "Polygon",
"coordinates": [
[
[-2.702, -5.784],
[-1.007, -5.827],
[-1.053, -6.348],
[-2.546, -6.385]
]
]
}
}
货物点 (Cargo Point)
类似于充电桩,此点指示机器人可以在何处找到货架进行装载或卸载。 它应与 align_with_rack 和 to_unload_point 移动动作类型配合使用。
条码 (Barcode)
条码用于唯一确定机器人的全局位姿。
{
"id": "d43d15cf4e4ad0bd2a24891badd74891",
"type": "Feature",
"properties": {
"mapOverlay": true,
"name": "Some user defined name",
"barcodeId": "D2_29",
"type": "37",
"yaw": "177.8"
}
"geometry": {
"coordinates": [
-1.052,
-5.485
],
"type": "Point"
}
}
激光雷达拟态区域 (LiDAR Deceitful Area)
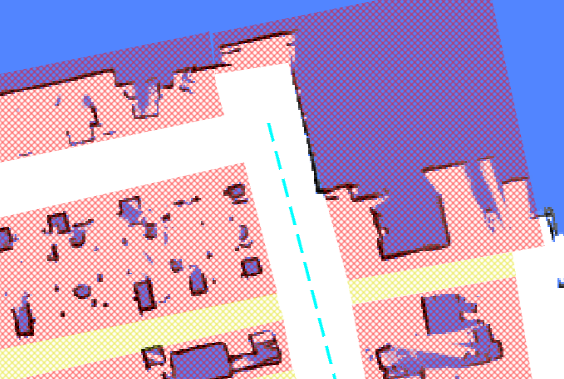
在地形不平坦的区域,2D 激光雷达可能会持续扫到地面,并将其误认为墙壁。
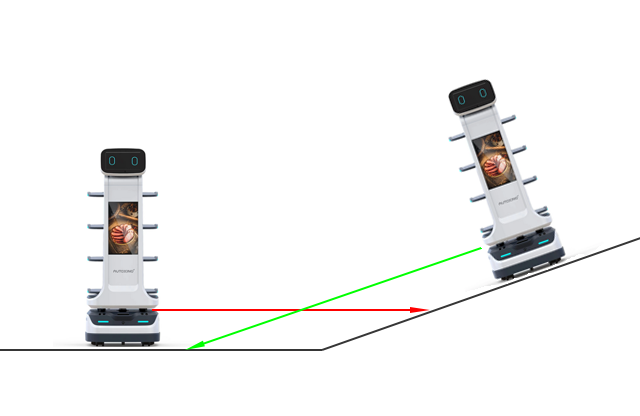
添加“激光雷达拟态区域”可以帮助解决此问题。 当经过这些区域时,机器人将优先考虑轮式里程计而不是激光雷达观测值。
{
"type": "Feature",
"properties": {
"regionType": 8
},
"geometry": {
"type": "Polygon",
"coordinates": [
[
[-2.702, -5.784],
[-1.007, -5.827],
[-1.053, -6.348],
[-2.546, -6.385]
]
]
}
}
陆标 (Landmarks)
自 2.11.0 起支持
陆标是在建图过程中收集的。 只有当它们存储在地图叠加层中时,才能用于定位。
{
"type": "Feature",
"properties": {
"type": "39",
"landmarkId": "landmark_1"
},
"geometry": {
"type": "Point",
"coordinates": [-2.702, -5.784]
}
}