服务 API (Service API)
重新校准 IMU (Recalibrate IMU)
启动 IMU 校准。在此过程中,机器人必须完全静止地停放在坚硬、平坦的地面上。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/imu/recalibrate
此服务调用仅触发校准过程;实际过程通常需要 10 到 20 秒才能完成。
校准完成后,将通过 /action WebSocket Topic 发送通知。
成功输出示例:
{
"topic": "/action",
"timestamp": 1681733608.653,
"email": "",
"username": "",
"deviceName": "718220110000909",
"action": "recalibrate_imu",
"message": "IMU calibration succeeded"
}
失败输出示例:
{
"topic": "/action",
"timestamp": 1681733580.702,
"email": "",
"username": "",
"deviceName": "718220110000909",
"action": "recalibrate_imu",
"message": "error: IMU calibration failed. Failed to rotate to right"
}
设置控制模式 (Set Control Mode)
curl -X POST \
-H "Content-Type: application/json" \
-d '{"control_mode": "auto"}' \
http://192.168.25.25:8090/services/wheel_control/set_control_mode
参数
class SetControlModeRequest {
control_mode: "auto" | "manual" | "remote";
}
使用 /wheel_state WebSocket Topic 监控当前的控制模式和车轮状态。
$ wscat -c ws://192.168.25.25:8090/ws/v2/topics
> {"enable_topic": "/wheel_state"}
< {"topic": "/wheel_state", "control_mode": "auto", "emergency_stop_pressed": true }
设置或清除急停 (Set or Clear Emergency Stop)
curl -X POST \
-H "Content-Type: application/json" \
-d '{"enable": true}' \
http://192.168.25.25:8090/services/wheel_control/set_emergency_stop
参数
class SetEmergencyStopRequest {
enable: boolean;
}
使用 /wheel_state WebSocket Topic 监控急停状态。
$ wscat -c ws://192.168.25.25:8090/ws/v2/topics
> {"enable_topic": "/wheel_state"}
< {"topic": "/wheel_state", "control_mode": "auto", "emergency_stop_pressed": true }
重启服务 (Restart Services)
重启机器人上的所有软件服务。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/restart_service
关闭或重启设备 (Shutdown or Reboot the Device)
curl -X POST \
-H "Content-Type: application/json" \
-d '{"target": "main_power_supply", reboot: false}' \
http://192.168.25.25:8090/services/baseboard/shutdown
参数
class ShutdownRequest {
target:
| "main_computing_unit" // 仅重启或关闭主计算板。
| "main_power_supply"; // 重启或关闭整个设备。
reboot: boolean; // true 为重启,false 为关机。
}
清除车轮错误 (Clear Wheel Errors)
curl -X POST http://192.168.25.25:8090/services/wheel_control/clear_errors
清除倾翻错误 (Clear Flip Error)
错误 8004 (倾翻错误) 表示发生了严重问题,例如机器人已侧翻。 这需要人工检查。问题解决后,使用此服务清除错误并使机器人恢复运行状态。
curl -X POST http://192.168.25.25:8090/services/monitor/clear_flip_error
清除打滑错误 (Clear Slide Error)
注意
实验性功能
错误 2008 (打滑错误) 表示机器人可能与不可见的障碍物发生了剧烈碰撞。在清除此错误之前需要进行人工检查。
curl -X POST http://192.168.25.25:8090/services/monitor/clear_slipping_error
开启或关闭激光雷达电源 (Power On or Off the Lidar)
curl -X POST \
-H "Content-Type: application/json" \
-d '{"action": "power_on"}' \
http://192.168.25.25:8090/services/baseboard/power_on_lidar
参数
class PowerOnRequest {
action: "power_on" | "power_off";
}
开启或关闭深度摄像头电源 (Power On or Off the Depth Camera)
curl -X POST \
-H "Content-Type: application/json" \
-d '{"enable": true}' \
http://192.168.25.25:8090/services/depth_camera/enable_cameras
参数
class EnableDepthCameraRequest {
enable: boolean;
}
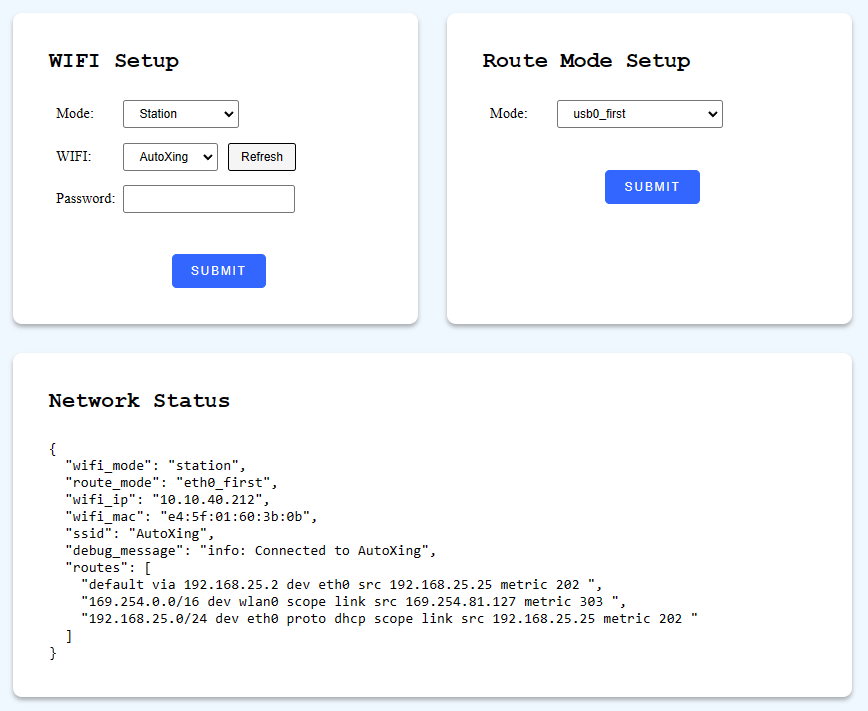
配置 Wi-Fi (Configure Wi-Fi)
在热点 (AP) 模式和基站 (Station) 模式之间切换 Wi-Fi。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"mode": "station", "ssid":"xxxxxxxxx", "psk": "xxxxx"}' \
http://192.168.25.25:8090/services/setup_wifi
参数
interface SetupWifiRequest {
mode: "ap" | "station";
ssid?: string; // SSID,Station 模式下必填
psk?: string; // Wi-Fi 预共享密钥,Station 模式下必填
route_mode?: "eth0_first" | "wlan0_first" | "usb0_first" | "wlan0_usb0_auto_first";
}
设置路由模式 (Set Route Mode)
配置机器人底盘的路由表规则。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"mode": "xxx"}' \
http://192.168.25.25:8090/services/set_route_mode
参数
interface RouteModeRequest {
mode: "eth0_first" | "wlan0_first" | "usb0_first" | "wlan0_usb0_auto_first";
}
route_mode: 确定路由表中网络接口的优先级:
eth0_first: 如果可用,将eth0设置为默认路由。wlan0_first: 如果可用,将wlan0设置为默认路由。usb0_first: 如果可用,将usb0设置为默认路由。wlan0_usb0_auto_first: 根据ping结果:如果wlan0具有互联网连接,则将其用作默认路由;否则,使用usb0。
在此本地网络地址也可以访问静态的 Wi-Fi 配置 HTML 页面:http://192.168.25.25:8090/wifi_setup
唤醒设备 (Wake Up the Device)
将机器人从睡眠状态唤醒。如果机器人已经处于唤醒状态,此命令无效。
curl -X POST http://192.168.25.25:8090/services/wake_up_device
监控 传感器管理状态 (Sensor Manager State) WebSocket Topic 以获取睡眠、唤醒或正在唤醒的状态。
启动全局定位 (Start Global Positioning)
curl -X POST \
-H "Content-Type: application/json"
http://192.168.25.25:8090/services/start_global_positioning
参数
interface StartGlobalPositioningRequest {
use_barcode?: boolean; // 默认为 true。
use_base_map_match?: boolean; // 默认为 true。
}
可以通过 全局定位状态 (Global Positioning State) WebSocket Topic 监控反馈。
条码 (Barcode)
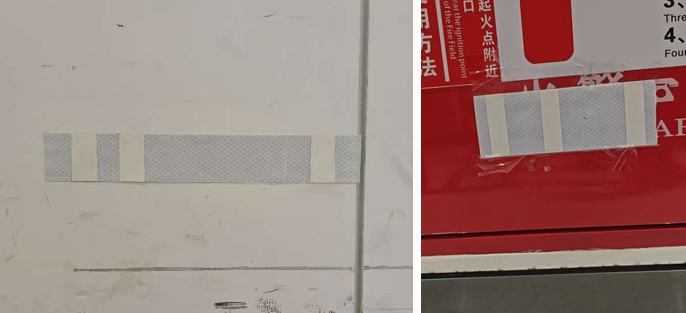
条码是由反光和不反光表面交替组成的标记。 现场的每个条码都包含唯一的 ID,使机器人能够在检测到条码时明确地确定其精确位置。
当 use_barcode 设置为 true 时,它的优先级高于基于点云的匹配。检测到的条码匹配始终被视为高度可靠。 要利用此功能,必须收集条码及其对应的位姿并将其添加到地图的 Overlays 中。
自动建图 (Auto-Mapping)
注意
实验性功能
启用自动建图后,机器人将自动探索并测绘其环境。 此功能仅在机器人处于建图模式时可用。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"enable": true}' \
http://192.168.25.25:8090/services/enable_auto_mapping
参数
interface EnableAutoMappingRequest {
enable: boolean;
}
重新检查错误 (Recheck Errors)
POST /services/monitor_recheck_errors
校准深度摄像头 (Calibrate Depth Cameras)
此服务将深度摄像头的点云与水平激光雷达的点云对齐。
在开始校准之前,请确保:
- 机器人位于平整、水平的地面上。
- 机器人正对着墙角或一个大型的长方体物体。
POST /services/calibrate_depth_cameras
校准陀螺仪刻度 (Calibrate Gyroscope Scale)
启动陀螺仪刻度校准。在此过程中,机器人必须完全静止地停放在坚硬、平坦的地面上。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/imu/calibrate_gyro_scale
此服务调用仅触发校准过程;实际过程通常需要约 20 秒才能完成。
校准完成后,将通过 /action WebSocket Topic 发送通知。
成功输出示例:
{
"topic": "/action",
"timestamp": 1681733608.653,
"email": "",
"username": "",
"deviceName": "718220110000909",
"action": "calibrate_gyro_scale",
"message": "Gyroscope scale calibration succeeded"
}
失败输出示例:
{
"topic": "/action",
"timestamp": 1681733580.702,
"email": "",
"username": "",
"deviceName": "718220110000909",
"action": "calibrate_gyro_scale",
"message": "error: Gyroscope scale calibration failed. Please remove nearby obstacles."
}
重置 USB 设备 (Reset USB Devices)
重置 USB 集线器有时可以帮助恢复发生故障的硬件设备。
格式 "1/3" 代表设备树中的 bus_id/dev_id。更多信息请参见 列出 USB 设备 (List USB Devices)。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"devices_to_reset": ["1/3", "8/1"]}' \
http://192.168.25.25:8090/services/reset_usb_devices
清除“系统异常关闭”报警 (Clear "System Down Unexpectedly" Alert)

curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/clear_system_down_unexpectedly
清除“距离数据全为零”错误 (Clear "Range Data All Zero" Error)
如果所有激光雷达点位返回的值均为 0,则表明激光雷达设备发生故障或失效。
此服务会临时清除相关的错误消息。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/clear_range_data_all_zero_error
顶升设备上、下、自检 (Jack Device Up, Down, Self-Check)
升高或降低顶升设备。顶升设备的状态可以通过 WebSocket 顶升状态 (Jack State) 获取。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/jack_up
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/jack_down
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/jack_self_check
校时 (Step Time)
如果系统时间不准确,使用此服务进行校正。
注意
GET 用于检测时间错误。请勿频繁调用。应使用 WebSocket /alerts Topic 监控时间错误。
curl http://192.168.25.25:8090/services/step_time
{
"should_step": false, // 无需校时
"message": "there is no need to make step: system time is 0.000253560 seconds fast of NTP time"
}
POST 用于校正时间。
curl -X POST http://192.168.25.25:8090/services/step_time
{
"message": "Step time successfully"
}
获取导航缩略图 (Get Nav. Thumbnail)
自 2.8.0 起,需要 caps.supportsGetNavThumbnail。
检索机器人及其周围环境的图像快照,包括地图、代价地图、点云和虚拟墙。
图像尺寸为 200x200 像素,可用于错误报告。

{
"stamp": 1707211001,
"map_name": "Ground Floor",
"map_uid": "xxxxx",
"map_version": 3,
"overlays_version": 8,
"map": {
"resolution": 0.05,
"size": [200, 200],
"origin": [12.12345, -3.12345],
"data": "iVBORw0KGgoAAAANS..." // base64 编码的 PNG
}
}
获取 RGB 图像 (Get RGB Image)
自 2.8.0 起,需要 caps.supportsGetRgbImage。
检索 RGB 摄像头的最新图像。这类似于 WebSocket RGB 图像流 (WebSocket RGB Image Stream),但对于仅需偶尔获取图像的应用场景更高效。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"topic": "/rgb_cameras/front/compressed"}' \
http://192.168.25.25:8090/services/get_rgb_image
响应格式与 WebSocket Topic 相同。
用辊道装卸货物 (Load/Unload Cargo with Roller)
自 2.9.0 起。
辊道的状态通过 WebSocket 辊道状态 (Roller State) 获取。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/roller_load
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/roller_unload
启动货架尺寸检测 (Start Rack Size Detection)
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/start_rack_size_detection
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/stop_rack_size_detection
使用机器人的激光扫描仪检测货架的宽度和深度。
注意
通常参考货架的技术规格或使用尺子手动测量更为准确。仅在最后手段时使用此服务。
使用步骤:
- 将机器人正对着货架停放。
- 调用
/start_rack_size_detection。 - 订阅 /detected_rack WebSocket Topic。
- 缓慢将机器人推入货架下方。
- 成功检测后,停止推动并记录货架尺寸。
- 在 系统设置 (system settings) 中输入宽度和深度。
清除顶升错误 (Clear Jack Errors)
如果顶升设备过载,它将报告错误。
发生这种情况时,大多数顶升型号仍可接受新命令。然而,一些罕见的型号要求在接受进一步命令之前手动清除错误。
curl -X POST http://192.168.25.25:8090/services/clear_jack_errors
确认急停 (Confirm Emergency Stop)
当机器人在坡道上或处于指定的坡道区域(在 Overlays 中指定)时,即使按下急停,车轮也不会释放。警告消息将出现在 /alerts WebSocket Topic 中:
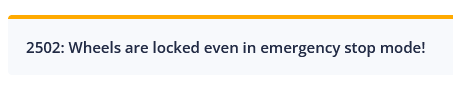
如果需要手动推动机器人,请使用以下命令确认释放车轮。
curl -X POST http://192.168.25.25:8090/services/confirm_estop
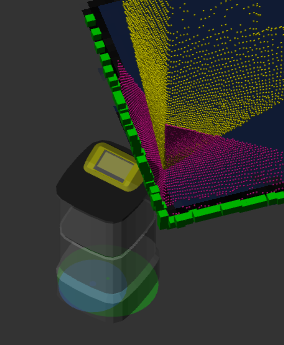
校准深度摄像头遮罩 (Calibrate Depth Camera Masks)
某些深度摄像头可能会捕捉到机器人自身车体的一部分。此服务用于识别哪些像素应该被遮罩,以防止机器人误将自身视为障碍物。
在校准之前,请将机器人放置在一个开阔区域,且任何深度摄像头的视野内均无障碍物。
curl -X POST http://192.168.25.25:8090/services/calibrate_depth_camera_masks
收集地标 (Collect Landmarks)
此服务用于为现有地图收集地标。
curl -X POST http://192.168.25.25:8090/services/start_collecting_landmarks
curl -X POST http://192.168.25.25:8090/services/stop_collecting_landmarks
结果存储在:
curl http://192.168.25.25:8090/collected_data
收集到的数据作为原始材料。开发人员必须手动将这些地标插入到 地标 Overlays (overlays) 中才能使用。
清除跌落风险警告 (Clear Fall Risk Warning)
curl -X POST http://192.168.25.25:8090/services/clear_fall_risk_warning
查询位姿 (Query Pose)
此 API 用于检索各种兴趣点 (POI) 的坐标。
例如,当机器人对接充电桩时,它会根据机器人的位置计算充电桩的位姿。
curl http://192.168.25.25:8090/services/query_pose/charger_pose
{
"pose": {
"pos": [4.179, -26.094],
"ori": 3.18
}
}
类似地,如果机器人(例如叉车或牵引机器人)停放在货物位置(例如托盘或挂车),系统可以从机器人当前位置推断出该位置的位姿。
curl http://192.168.25.25:8090/services/query_pose/pallet_pose
curl http://192.168.25.25:8090/services/query_pose/trailer_pose
{
"pose": {
"pos": [4.179, -26.094],
"ori": 3.18
},
// 自 2.13.0 起。如果 reference == 'center_of_front_edge',返回的位姿是
// 托盘或挂车前边缘的中心(新逻辑)。
// 否则,位姿是托盘或挂车的中心(已弃用)。
"ref": "center_of_front_edge"
}
探测 V2X 信标 (Probe V2X Beacons)
此服务向信标发送消息以激活它们数秒。这对于测试连接性并触发响应非常有用。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/probe_v2x_beacons
使用 V2X 健康状态 (V2X Health State) WebSocket Topic 来监控信标响应和健康状态。
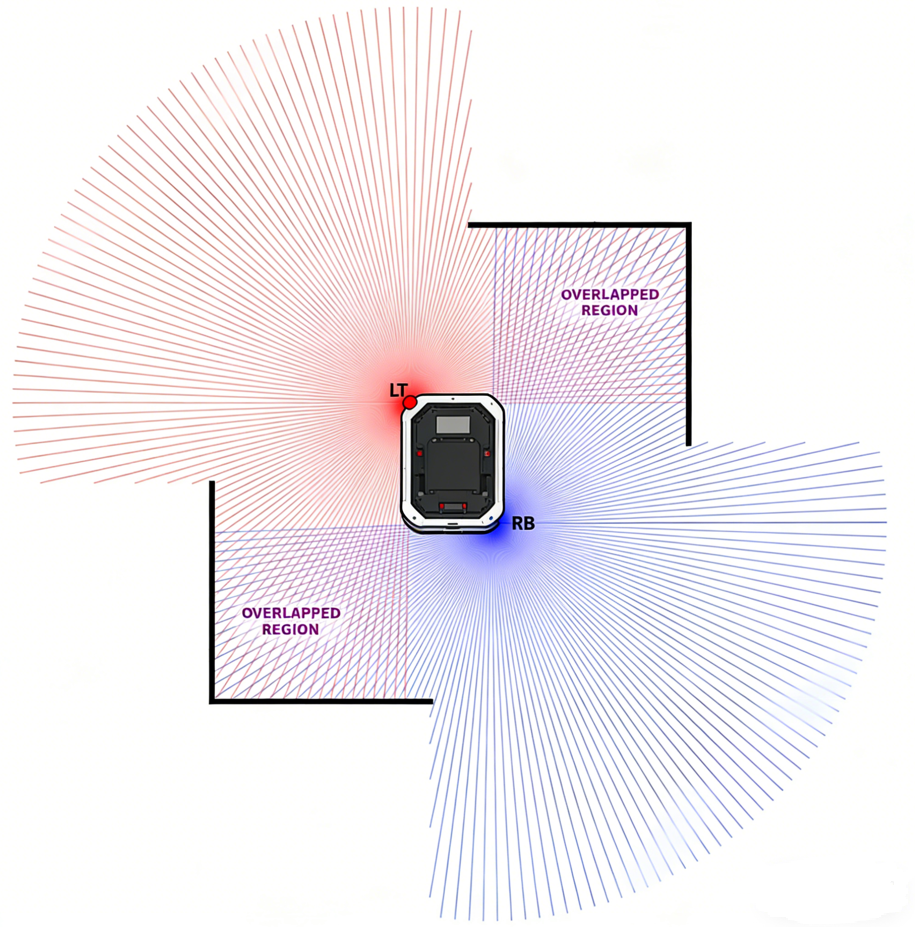
校准双激光雷达位姿 (Calibrate Duo Lidar Poses)
此服务用于校准安装在左前角和右后角的双激光雷达位姿。 仅当 "caps.supportsDuoLidar" 为 true 时才应调用此服务。
该服务接受一个可选的 calibration_step 参数,用于选择校准模式:
interface CalibrateDuoLidarPosesRequest {
calibration_step?: "single_shot" | "right_wall" | "front_wall";
}
单次模式(默认)(Single Shot Mode)
在双激光雷达视野的重叠区域之一,必须有清晰的水平和垂直墙壁。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/calibrate_duo_lidar_poses
右墙模式 (Right Wall Mode)
当难以找到两面垂直墙壁时,可使用此模式和前墙模式。只需要一面长墙。
校准期间,请确保:
- 机器人右侧应有一面长墙。
- 机器人右侧与墙壁之间的距离应为 1 – 2 米。
- 墙壁必须足够长,以便两个激光雷达都能看到。
- 墙壁与机器人右侧应精确平行——公差小于 0.5°。
- 地面应平坦。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"calibration_step": "right_wall"}' \
http://192.168.25.25:8090/services/calibrate_duo_lidar_poses
前墙模式 (Front Wall Mode)
先运行右墙模式,然后将机器人旋转面向同一面墙。
校准期间,请确保:
- 首先完成右墙模式校准。
- 墙壁必须足够长,以便两个激光雷达都能看到。
- 墙壁必须距离机器人至少 2 米。
- 墙壁可以大致与机器人前边缘平行——最大公差为 5°。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"calibration_step": "front_wall"}' \
http://192.168.25.25:8090/services/calibrate_duo_lidar_poses
牵引钩锁定 (Towing Hook Lock)
锁定牵引钩以固定挂载的挂车。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/towing_hook_lock
牵引钩释放 (Towing Hook Release)
释放牵引钩以卸下挂载的挂车。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/towing_hook_release
清除牵引钩错误 (Clear Towing Hook Error)
清除由牵引钩设备报告的错误。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/clear_towing_hook_error
装卸货物 (Load/Unload Cargo)
触发通过机器人的货物搬运机构进行货物的装载或卸载。
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/load_cargo
curl -X POST \
-H "Content-Type: application/json" \
http://192.168.25.25:8090/services/unload_cargo